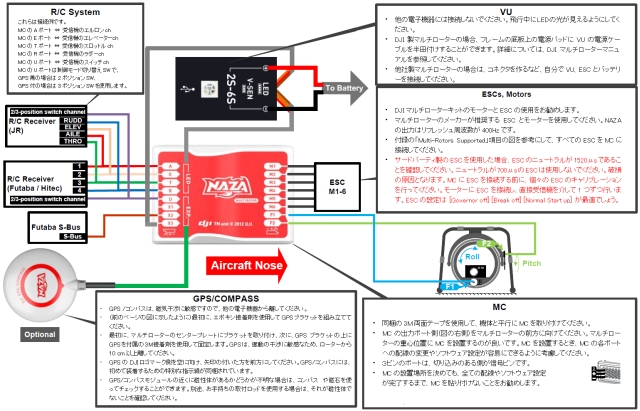
=== DJI製マルチローターコントローラー「NAZA」の設定 ===
◆ DJI NAZA取扱説明書(日本語マニュアル)
これは、原本「Naza User Manual v2.7」を元に、日本語版として私が作成したものです。
信頼性はまったくありません。
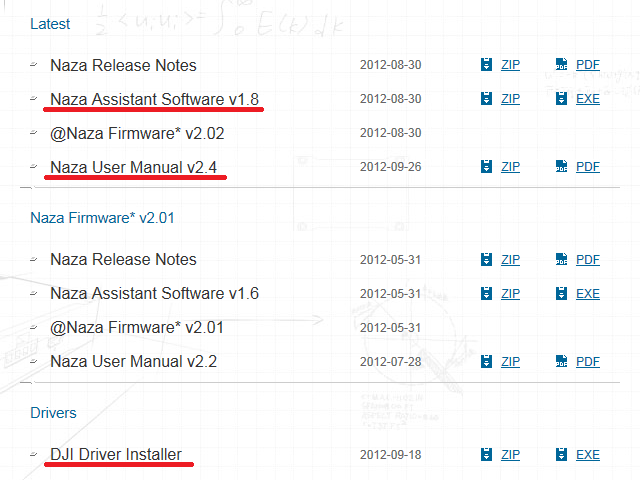
 DJI NAZA取扱説明書(日本語マニュアル)のダウンロード
DJI NAZA取扱説明書(日本語マニュアル)のダウンロード
原本「Naza User Manual v2.7」は
http://www.dji-innovations.com/products/naza-multi-rotor/downloads/
◆ プロポの設定
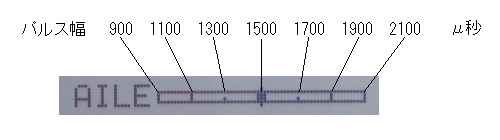
どうも、DJIはFUTABAプロポをターゲットとしているみたいです。
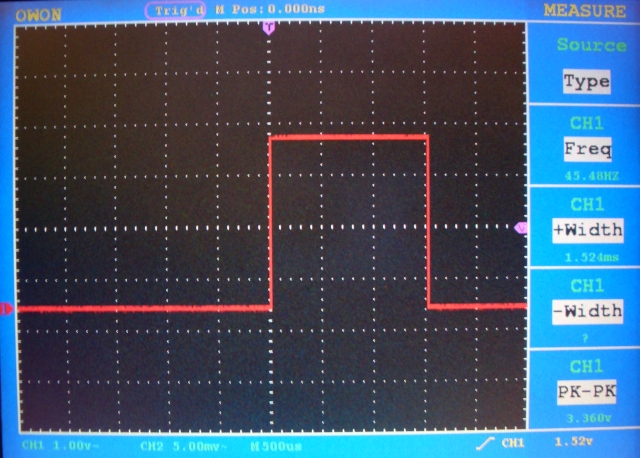
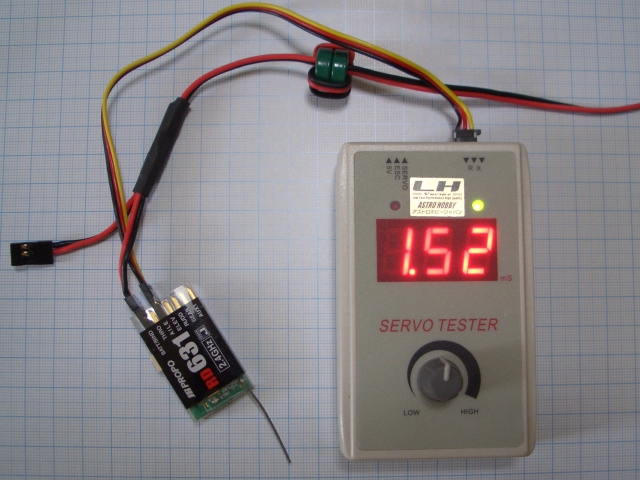
・ニュートラルが1520μs。
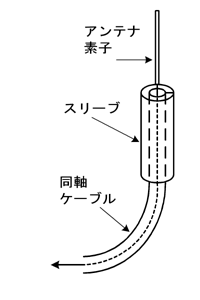
・S-BUSはサポートしているが、JRのエクストラアンテナは接続できない。
(私の場合)
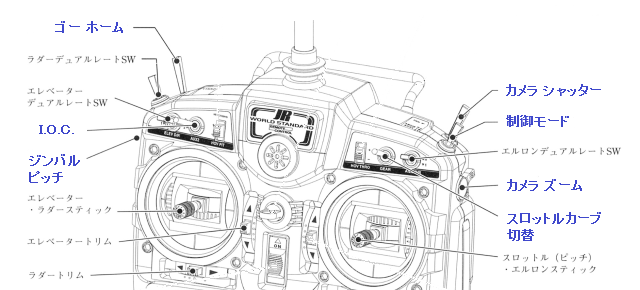
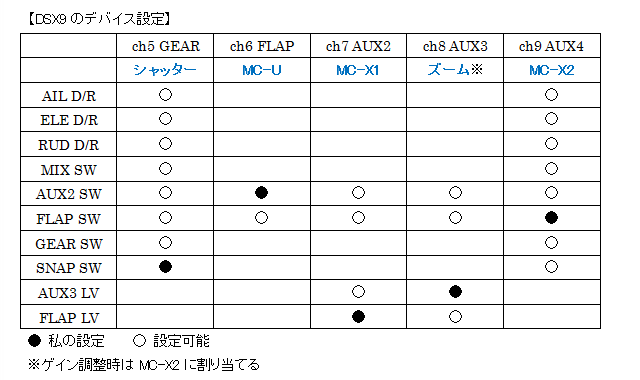
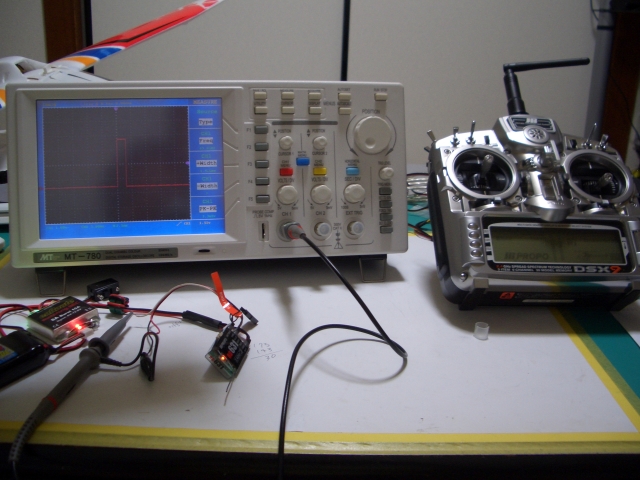
送信機: JR DSX9 受信機: JR RD931
◆ NAZAの設定 (飛行前)
万が一の誤動作で、怪我をすることが無いよう、全てのプロペラをはずしておきましょう。
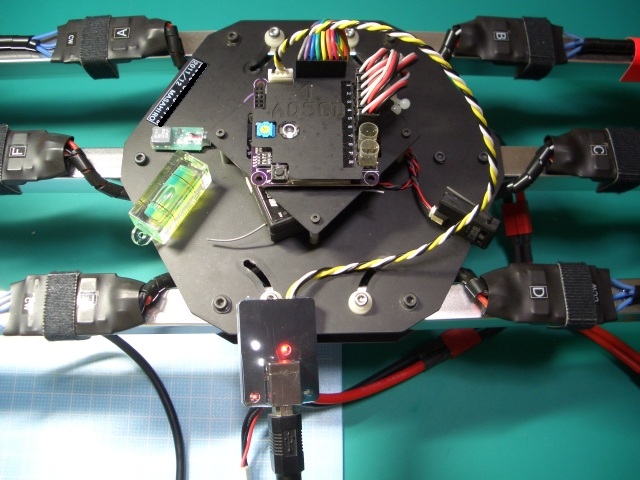
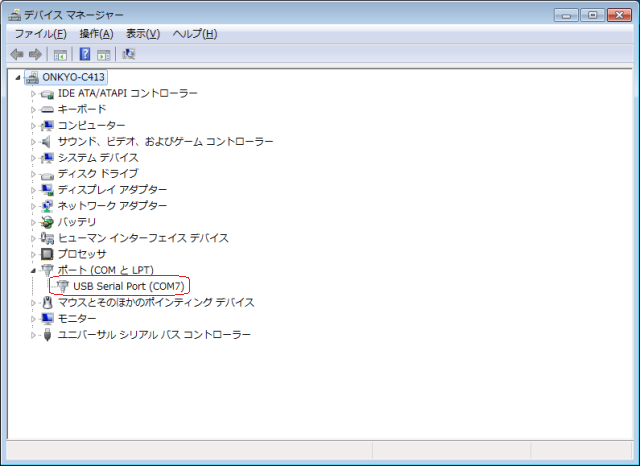
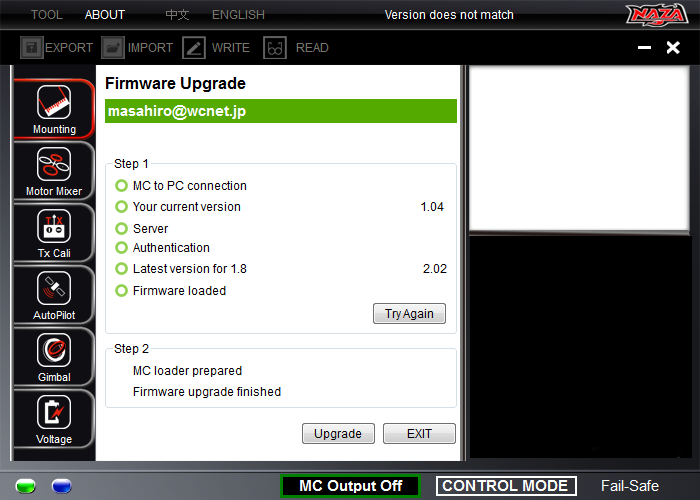
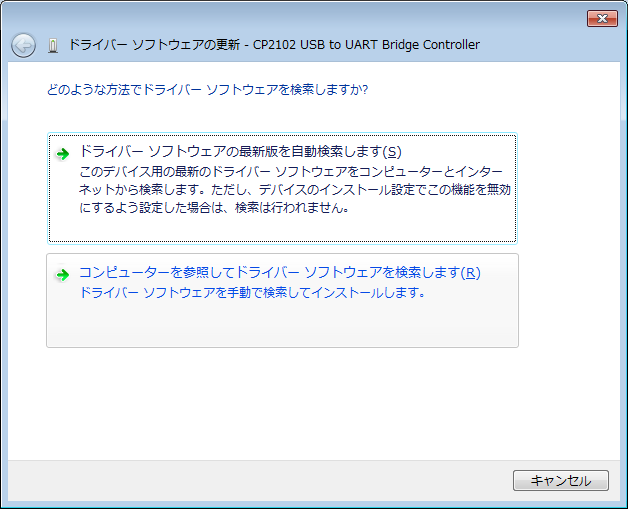
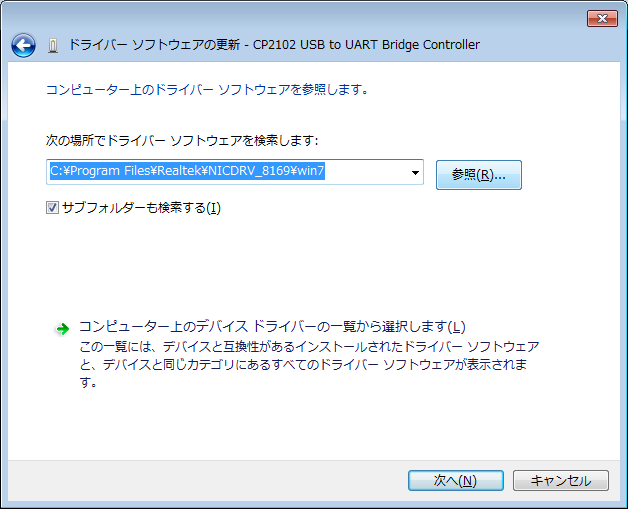
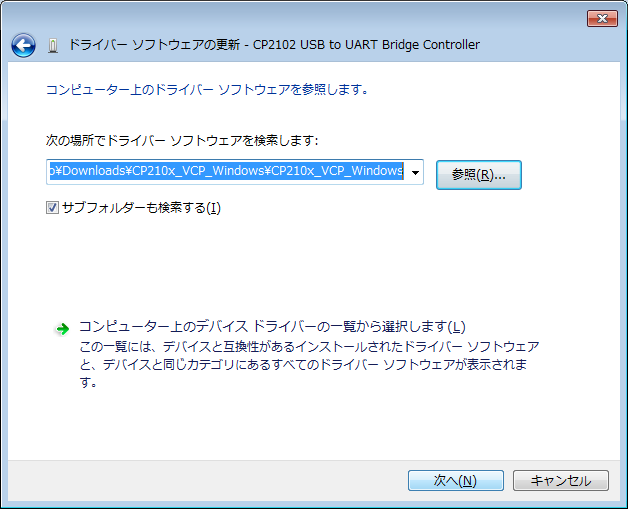
MCとPCとをUSBケーブルで接続する。
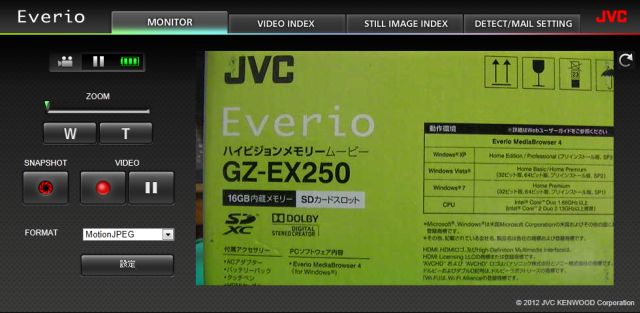
アシスタントソフトウェアを起動する。

送信機の電源をON にする。
マルチコプターの電源をON にする。
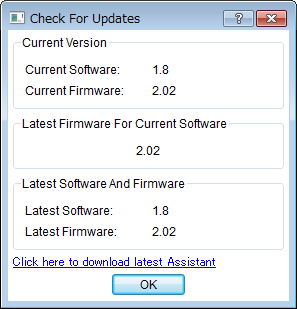
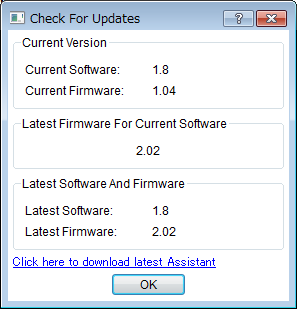
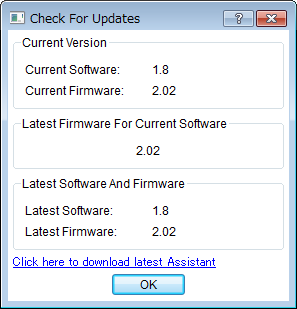
「OK」をクリックする。
左下のランプにおいて、緑が点灯、青が点滅していればMC と通信状態にあります。
電源投入後、MCの全ての設定データが自動で読み込まれますが、 不安な時や設定変更がMCに反映されているかどうかチェックする時は「READ」をクリックします。
「READ」 と「WRITE」 は、現在のページのみに適用されます。
もし、途中でマルチコプターの電源をOFFすると、赤が点灯、青が消灯します。

マルチコプターの電源をONにするだけで、(設定可能に)戻ります。
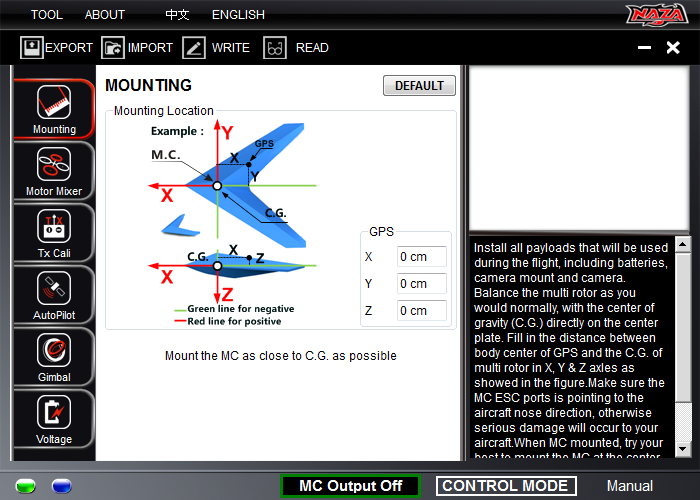
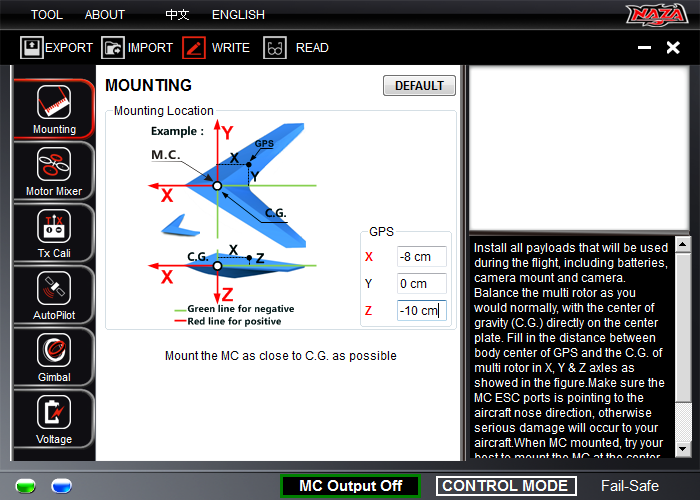
● Mounting (GPS/コンパスモジュール付)
Mounting Location
GPS/コンパスモジュールの取り付け位置のオフセット値を入力します。
図の赤矢印がプラスです。
値を変更するには、その欄(テキストボックス)内をドラッグ し、値を入力します。 単位の入力は不要です。
し、値を入力します。 単位の入力は不要です。
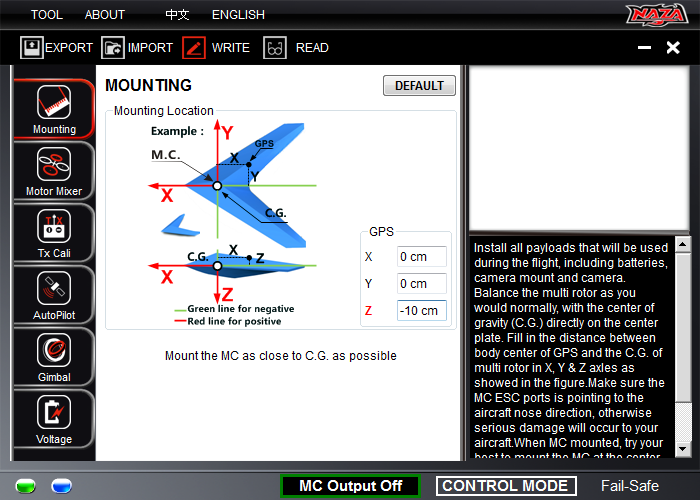
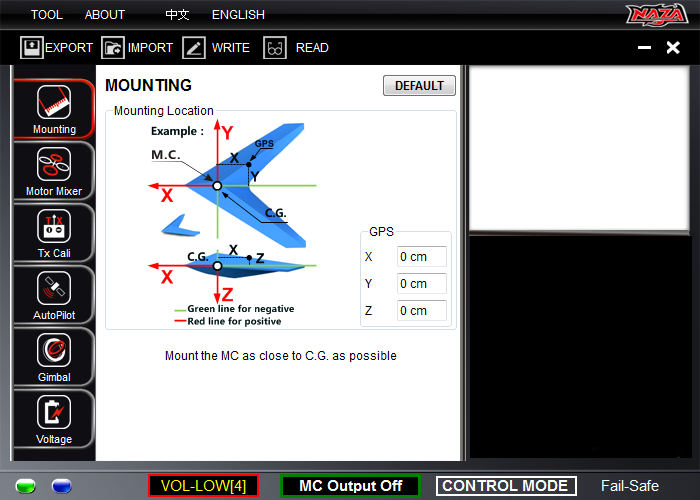
変更後は、「WRITE」 をクリックします。 赤色Zが黒色に変わります。
各ページ(項目)において、値が変更された時は、Zのような変数名か値の色が赤色に変わります。
「WRITE」 をクリックすると、黒色になり、MCに反映したことを意味します。
さらに変更が反映されているかを確認したければ、「READ」をクリックするとよいでしょう。
● Motor Mixer
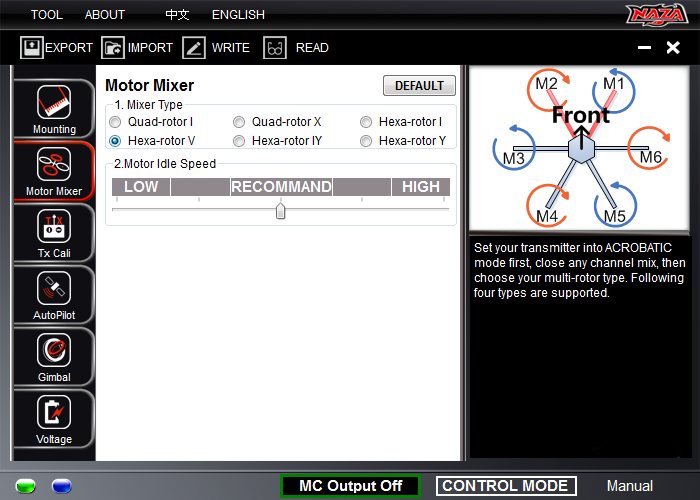
1. Mixer Type
マルチコプターのタイプを選択します。
2. Motor Idle Speed
そのまま(RECOMMEND)でよいでしょう。
● Tx Cali
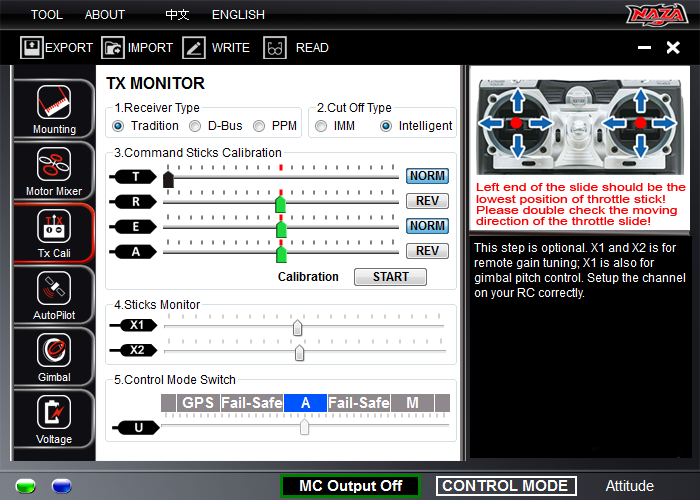
1. Receiver Type
2.4GHzやPCMの場合は「Tradition」、FUTABAのS-BUSの場合は「D-Bus」を選択します。
2. Cut Off Type
「Intelligent」 がよいでしょう。
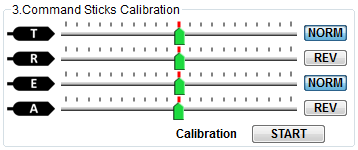
3.Command Sticks Calibration
T(スロットル) ・・・ 左がLow、右がHighです。
R(ラダー) ・・・ 左が左、右が右です。
E(エレベーター)・・・左がアップ、右がダウンです。
A(エルロン) ・・・ 左が左、右が右です。
つまり、スティックとの関連性は、「左右は左右、左が下、右が上」と覚えればよいでしょう。
・送信機のスティックを動かしてみて、方向が一致するように、「NORM/REV」をクリックします。
送信機側でリバース設定しても構いません。
・キャリブレーションを行います。
Calibration 「START」 をクリックします。
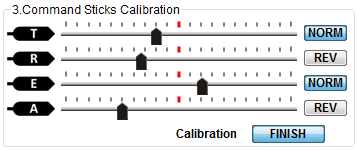
カーソルがランダムに動きます。
スロットル、ラダー、エレベーター、エルロン 各スティックを可動範囲いっぱいに上下左右に2回以上往復させます。
カーソルが左右いっぱいに動き、スティックがニュートラル位置でカーソルがセンター(緑)になればOKです。
スティックはランダムに動かすのではなく、各チャンネル毎にカーソルを確認しながら行うとよいでしょう。
「FINISH」 をクリックします。
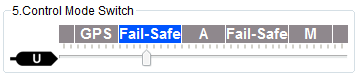
5. Control Mode Switch
MCのポートUが接続されている送信機の3ポジションスイッチ(制御モードスイッチ)を動かして、
それぞれの領域が青になるように調整します。
制御モードスイッチを「Atti.」位置にし、A が青になるように、サブトリムを調整します。
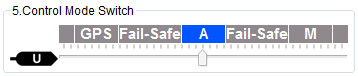
制御モードスイッチを「Manual」位置にし、M が青になるように、エンドポイントを調整します。
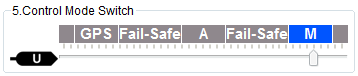
制御モードスイッチを「GPS Atti.」位置にし、GPS が青になるように、エンドポイントを調整します。
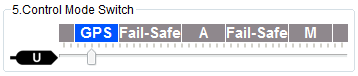
フェイルセーフ時に、Fail-Safeが青になるようにします。 Fail-Safe 位置はAの左右どちらでも構いません。
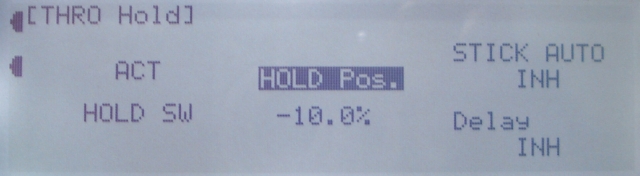
私は、MIX スイッチ(スロットルホールドスイッチ)をON でFail-Safe 位置に移動するように、ミキシング機能を使いました。
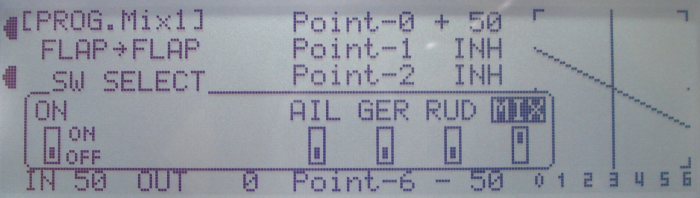
もちろん、受信機のフェイルセーフも、この位置を記憶させています。
(参考) DSX9 で、全チャンネルをフェイルセーフ設定するには
1) 受信機にバインドプラグを挿入する。
2) 受信機の電源をON する。
3) 受信機のLED が点滅しているのを確認して、バインドプラグを抜く。
4) 送信機のスティックやスイッチ位置をフェイルセーフ位置にする。
5) 送信機のボタンを押しながら、電源をON する。
6) 受信機のLEDが常時点灯すれば完了。
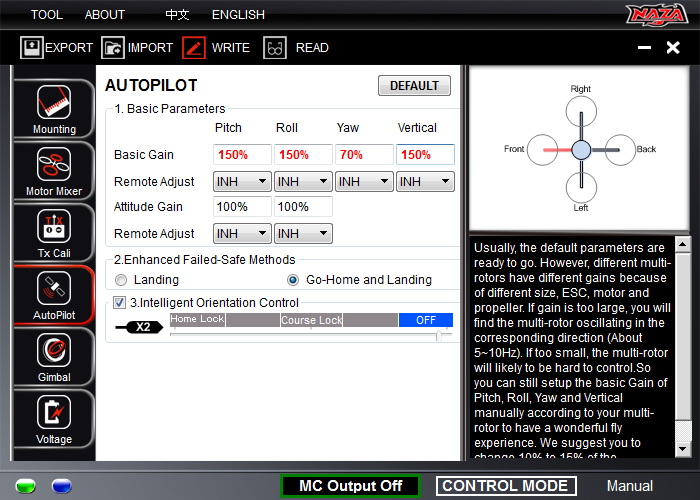
● AutoPilot
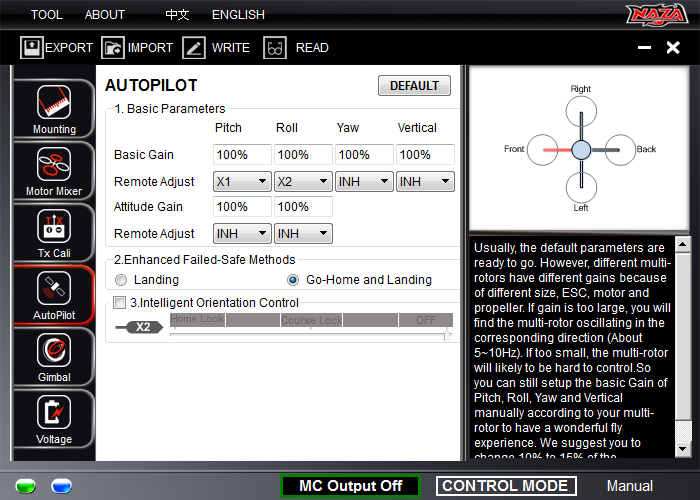
1. Basic Parameters
「DEFAULT」をクリックすると、全て100% になります。
リモートゲインチューニングを使って、飛行テストを行います。
まずは、Remote Adjust の Pitch をX1 に、Roll をX2 に設定します。
X1、X2 は送信機のレベルボリューム(LV)チャンネルに割り当てるとよいでしょう。
LV がニュートラルの位置でゲインを100% に設定しておくと、LV 操作で、ゲインは50% ~ 200% まで可変できます。
ニュートラル位置を1倍として、1/2倍 ~ 2倍変化できます。
(飛行場において)Pitch とRoll の調整が終わったら、次にYaw とVertical をX1、X2 に割り当て、
順々に調整すればよいでしょう。
設定可能なゲインの範囲は
Basic Gain
Pitch 20% ~ 500%
Roll 20% ~ 500%
Yaw 30% ~ 300%
Vertical 50% ~ 200 %
Attitude Gain
Pitch 40% ~ 400%
Roll 40% ~ 400%
2. Enhanced Failed-Safe Methods
「Go-Home and Landing」を選択し、テスト飛行してみましょう。
3. Intelligent Orientation Control
現在X2ポートはリモートゲインチューニングで使用しますので、ゲイン調整が終わってから使用します。
「WRITE」 をクリックします。
● Gimbal
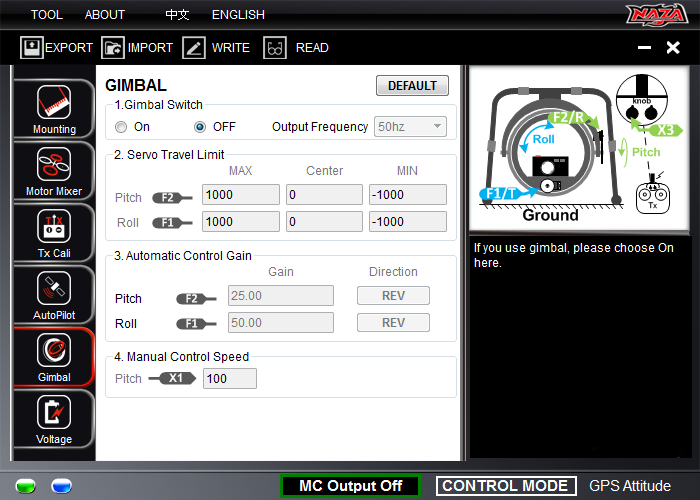
1. Gimbal Switch
「OFF」 を選択します。
ジンバルのピッチコントロールにX1ポートを使用しますので、これもゲイン調整が終わってから使用します。
MCのF1ポートおよびF2ポートからは、信号が出ていますので、ジンバル制御用サーボは接続しません。
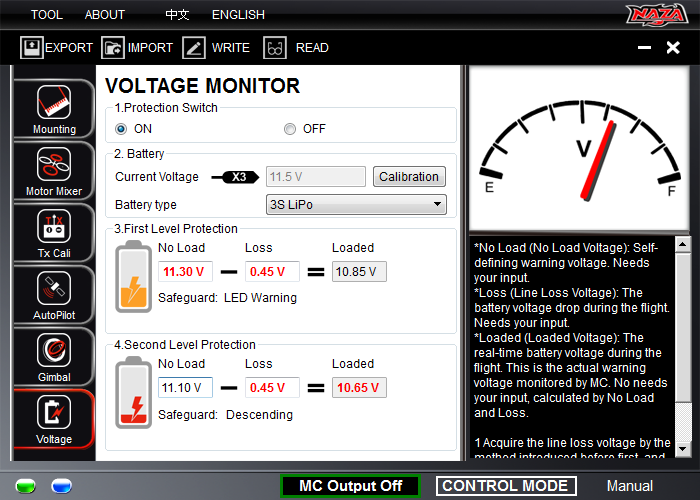
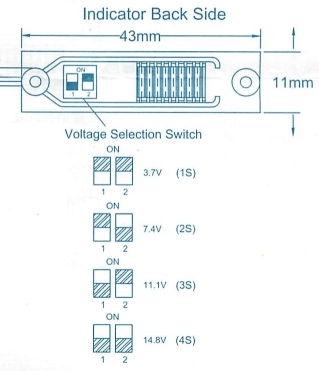
● Voltage
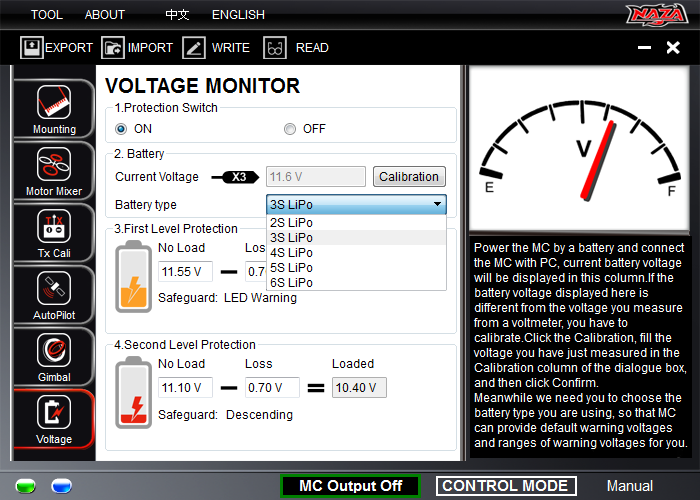
1. Protection Switch
「ON」 を選択します。
2. Battery
Battery Type
使用するLi-Poバッテリーのセル数を選択します。
Current Voltage 「Callibration」 をクリックします。
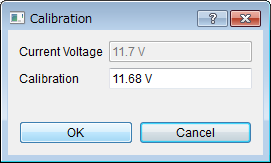
Calibration の欄に信頼のおける電圧計で測定した電圧を入力します。
「OK」 をクリックします。
3. First Level Protection
数値はこのままにしておきます。 テスト飛行後に調整します。
4. Second Level Protection
数値はこのままにしておきます。 テスト飛行後に調整します。
「WRITE」 をクリックします。
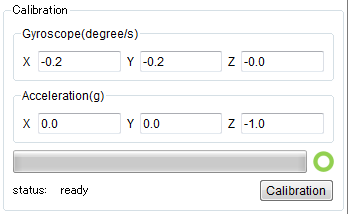
● IMU Calibration

「TOOL」 ⇒ 「IMU Calibration」 を開きます。
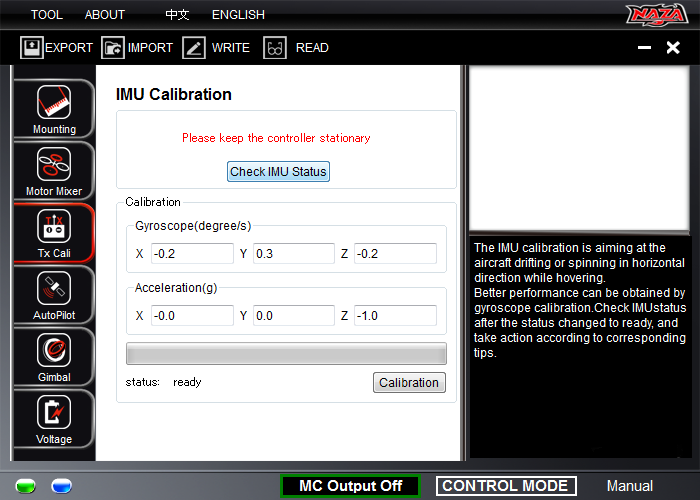
「Check IMU Status」 をクリックします。
このようなメッセージがでれば、キャリブレーションの必要はありません。
でも、やってみましょう。
機体を振動のない安定した場所に置きます。 特に水平でなくてもいいですが、
キャリブレーション中は絶対に機体を動かさないこと!!
「Calibration」 をクリックします。
これで、アシスタントソフトウェアによる飛行前の設定は終わりました。
電源を切り、USBケーブルを抜きます。
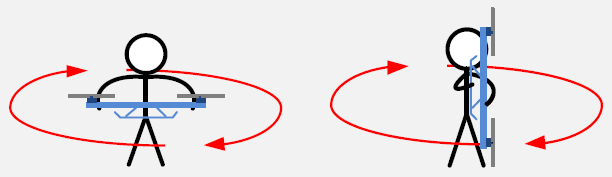
◆ デジタルコンパスの校正
周囲に鉄などの強磁性体がある場所は避けてください。
送信機、マルチコプターの順に電源をON します。
制御モードスイッチを、Manual ⇔ GPS Atti.間で、すばやく6~10回カチッカチッ・・・と往復(切替)させます。
VU のLED が黄色で常時点灯します。
マルチコプターを水平に持ち、1週以上回します。 LED が緑色で常時点灯。
マルチコプターを垂直に持ち、LED が消灯するまで回します。
もし、LED が赤色で高速点滅したら失敗ですので、場所を変えて、再度行います。
<以上で飛行前の設定は終了しました>
この後、飛行場にて、ゲイン調整などを行います。
◆ ゲイン調整
Basic Gain
Pitch
エレベータで、前後に揺さぶります。
ゲインを上げていくと、スティックをニュートラルに戻した時、揺れる感じが見えてきます。
揺れがなく、素直に水平に戻るまでゲインを下げます。
Roll
エルロンで、左右に揺さぶります。
ゲインを上げていくと、スティックをニュートラルに戻した時、揺れる感じが見えてきます。
揺れがなく、素直に水平に戻るまでゲインを下げます。
Yaw
ラダーの舵を入れたときと抜いたときに、機体が一瞬上昇します。(上下変動)
ゲインを高くすると、この現象が顕著に現れます。
ゲインを下げるとこの現象が少なくなりますが、スティックをニュートラルに戻した時の止まりが悪くなります。
ゲインを下げても、ヨー軸方向に回転(ヘリのテールが流れる)することは、まったくありません。
この現象は、Vertical ゲインを上げることで、少しは改善されます。
Vertical
スロットルをあおってやります。
ゲインを上げていくと、モーター音が「ビーン」から「ビ・ビーン」さらに「ビ・ビ・ビーン」という音になります。
「ビーン」という音になるまで、ゲインを下げます。
Basic Gain においては、おおむね次のことがわかりました。
・ ローター数が多いほど、ゲインは高く設定できる。
・ 機体が重いほど、ゲインは高く設定できる。
・ 重心位置が低いほど、ゲインは高く設定できる。
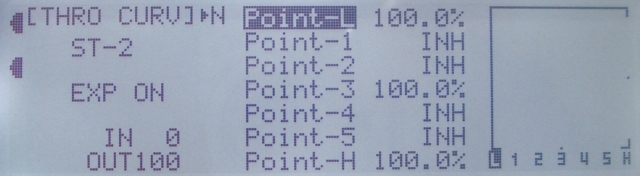
Attitude Gain
これは、打の効き具合を調整するものです。 私の場合は、空撮目的なので、100% で充分だと感じました。
少し高めに設定して、プロポのD/RやEXPで調整するのもよいかもしれません。
ゲイン調整の手順として、
・ 飛行して、Pitch とRoll のゲインを調整します。(既にX1、X2 に割り当てています)
・ MCとPCを接続し、アシスタントソフトウェアを起動し、現在のゲイン値を読み込みます。
・ Pitch とRoll の読み込んだ値より少し低めの、きりの良い数値を入力します。
・ Pitch とRoll のRemote Adjust をINH にします。
・ 送信機のLV(X1とX2 に対応したチャンネル)をニュートラルに戻します。
・ 次に、YawとVertical のRemote Adjust をX1、X2 に割り当てます。
・ 「WRITE」をクリックします。
を繰り返して、Basic Parameters の全てのゲイン値を決めていきます。
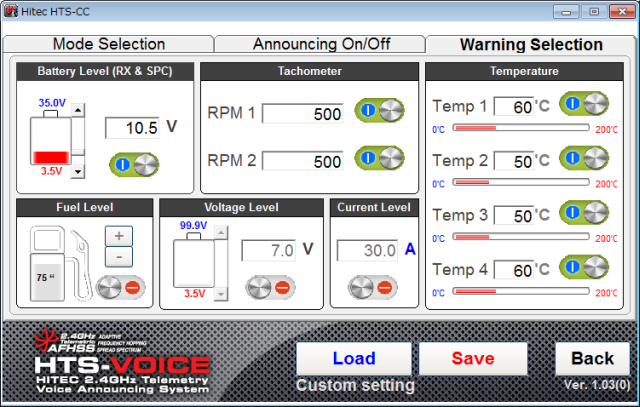
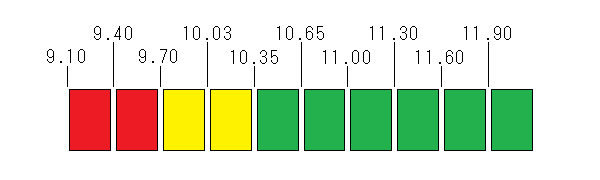
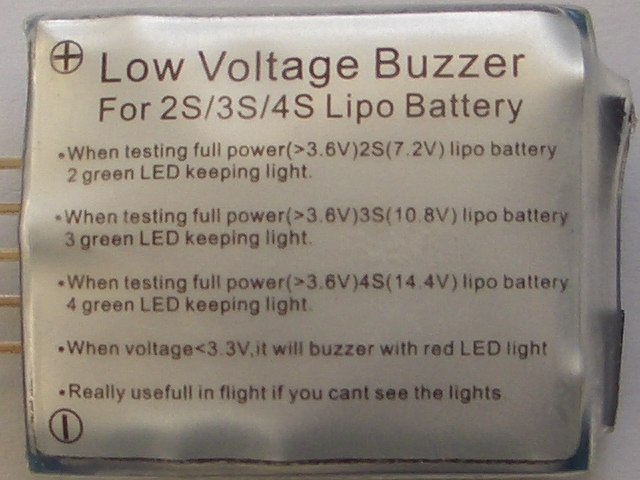
◆ バッテリー低電圧警告の設定
VU のLED が見える状態で、ホバリングさせます。
LED が赤点滅を始めたら、即座に着陸させます。
アシスタントソフトウェアを使って、Voltage 項目を表示させます。
Current Voltage (現在の電圧)から「3.First Level Protection」のLoaded 値を引いた値がLoss 値となります。
Loss の欄に記入します。
3.First Level Protection のNo Load 値は、残量20%で11.3V位です。(3セルの場合)
4. Second Level Protection のNo Load 値は、Li-Po の規定値の11.1V としました。
変更後は、「WRITE」 をクリックします。
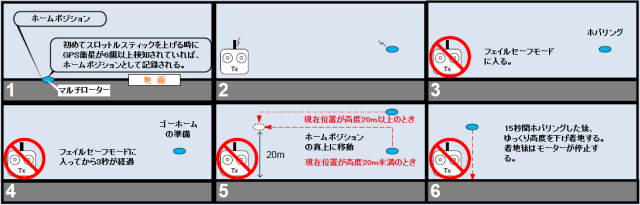
◆ Go Home & Landing のテスト
現在の高度が20m未満の時
高度20mまで上昇し、ホームポイントの真上まで移動し、15秒間ホバリング
現在の高度が20m以上の時
現在の高度でホームポイントの真上まで移動し、ホームポイントの真上20mで15秒間ホバリング
その後、ゆっくり着地し、モーターが停止します。

(注意)
・ マルチコプターの電源をONにした場所がホームポジションとして記憶されるので、注意してください。
・ GPSの誤差は2.5m位あるので、自動車などの近くで電源をON しないようにしてください。
・ 最初は、いつでも手動操作に切り替えできるように送信機を持っていてください。
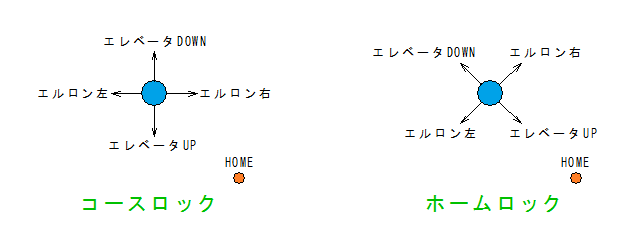
◆ I.O.C.(Inteligent Orientation Control)の設定
全てのゲイン調整が終わったら、X2チャンネルをプロポの3ポジションスイッチ(私はFLAPスイッチを使用)に設定します。
ポジション-1(中間)で、Course Lock が青になるように、送信機のサブトリムを調整します。

ポジション-0 で、OFF が青になるように、送信機のエンドポイントを調整します。

ポジション-2 で、Home Lock が青になるように、エンドポイントを調整します。

おそらく、無調整でOK でしょう。
◆ I.O.C.のテスト
機首方向に関係なく、エルロンとエレベータ操作で下図のように機体が移動します。
飛行中にラダーで機首方向を変えても操作は同じです。
前方向の記録
2チャネルスイッチをすばやく3~5回OFFとコースロック間でスライドすることにより、いつでも新しい機首方向を前方向として記録することができます。
ホームポイントの記録
制御スイッチを、コースロックとホームロック間で、すばやく3~5回スライドすることにより、現在の位置を新しいホームポイントとして記録することができます。
これを行うとゴーホーム時のホームポイントが変更されます
(注意)
・ ホームポイント近くでホームロックを使用するきは注意してください。 これは、操縦者の頭がこんがらがります。
・ 普通にRCヘリコプター等が操縦できる人がI.O.C.を使うと、間違った操作をするかもしれません。
・ 遠く離れて機首方向が分からなくなったとき、ホームロックに切替、エレベーターUP操作で機首が確認できる距離まで寄せてきて、ホームロックを閉じるのが良いと思いました。
・ 「すばやく」の意味は、ゆっくりすぎてはだめです。また、「3~5回」とは、3回未満や6回以上ではだめです。地上でテストしてみてください。緑LEDが点滅すればOKです。
◆ Gimbal の設定 (空撮目的でなかったら不要です)
これは、室内で行うのが良いでしょう。
MCのX1ポートに接続されたチャンネルに送信機の好みのデバイスを割り当てます。
私の場合は、FLAP LV のままです。
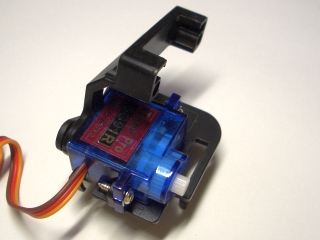
MCのF1ポートにジンバルのピッチ制御サーボを、F2ポートにジンバルのロール制御サーボを接続します。

1. Gimbal Switch
「On」 を選択します。
Output Frequency
アナログサーボの場合は50Hzにします。
デジタルサーボの場合は、それより高い周波数でもOKだと思いますが、200Hz以下で十分だと思います。
2. Servo Travel Limit
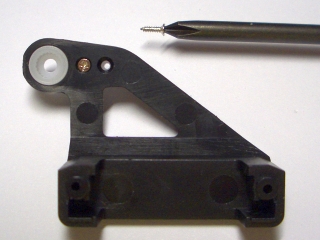
機械的に干渉しないように、最大値を決定します。
3. Automatic Control Gain
機体を前後左右に傾けてもカメラマウントが水平になるよう、Gain(制御量) とDirection(制御方向)を調整します。
4. Manual Control Speed
数値を小さくすると、送信機で過激なピッチ操作を行っても、サーボがゆっくり遅れて動くようになります。
自動調整には影響しません。
スイッチ操作でピッチを変える場合は、低い値がよいでしょう。
(ただいま、更新中です)

































































































































































































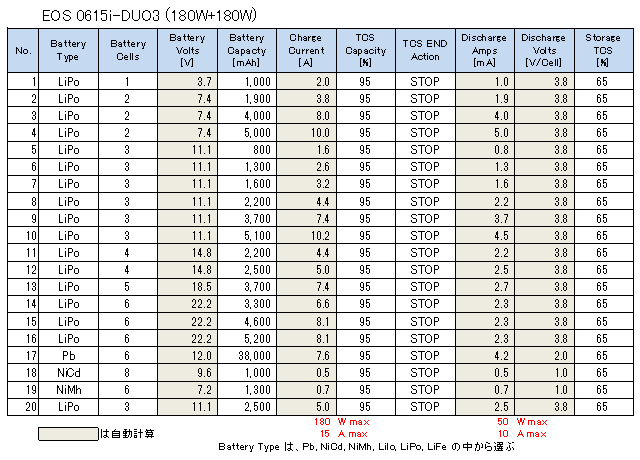
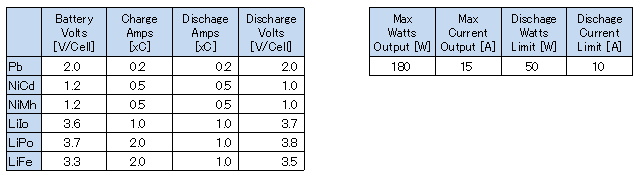
 EOS_Charger_Setting_Seet.xlsxファイルをダウンロード
EOS_Charger_Setting_Seet.xlsxファイルをダウンロード EOS_Charger_Setting_Seet.zipファイルをダウンロード
EOS_Charger_Setting_Seet.zipファイルをダウンロード