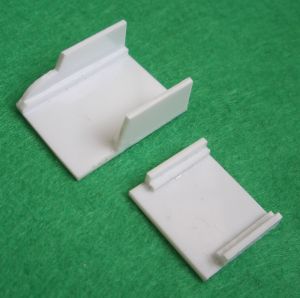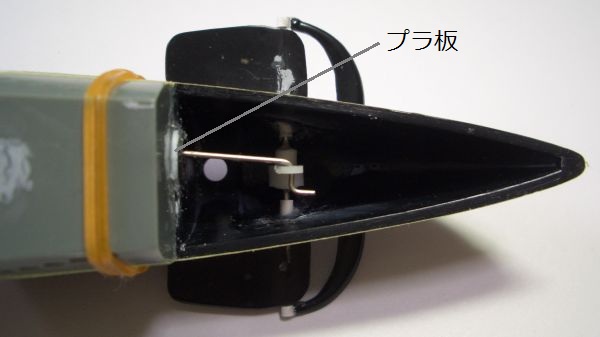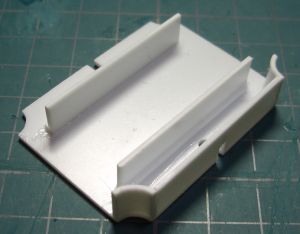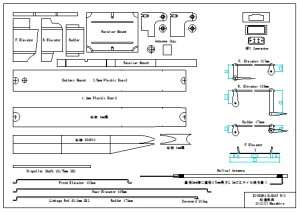
TAMIYA製プラ板 1.2mm厚と0.5mm厚。
サーボマウント他に使用。
|
|

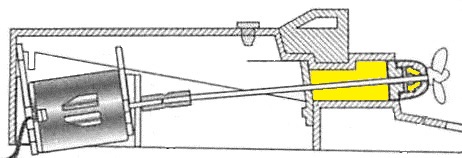
NIFTEC製 SUSねじロッド
M2.3 ⇒φ2.0mm プロペラシャフトに使用。
M2.0 ⇒φ1.8mm ラダーに使用。
|

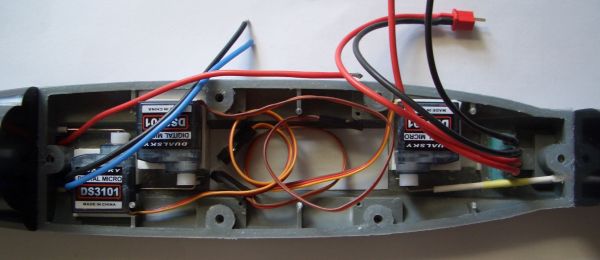
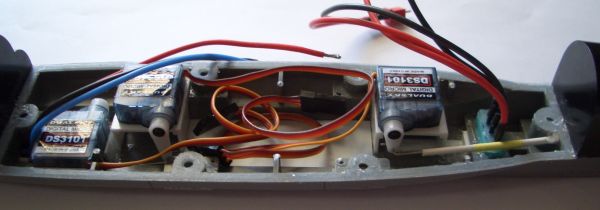
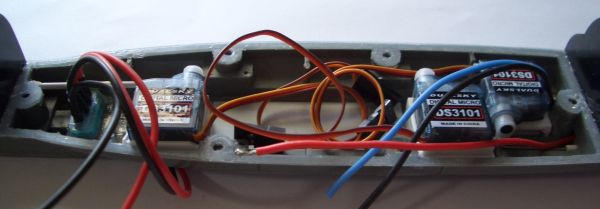
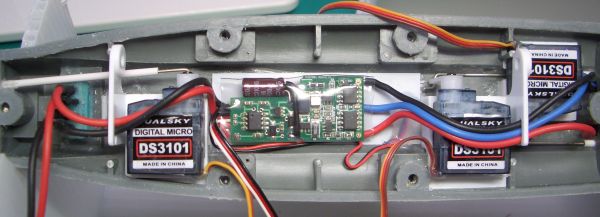
サーボDS3101 x 3個
サイズ: 19.2 x 19.3 x 8.2mm
重量: 4.4g (ケーブルコネクター含む)
|
|

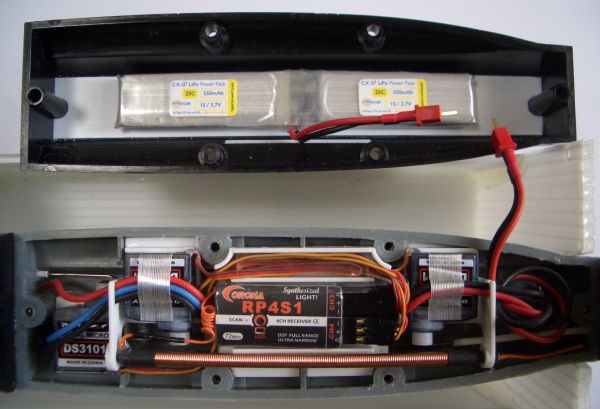
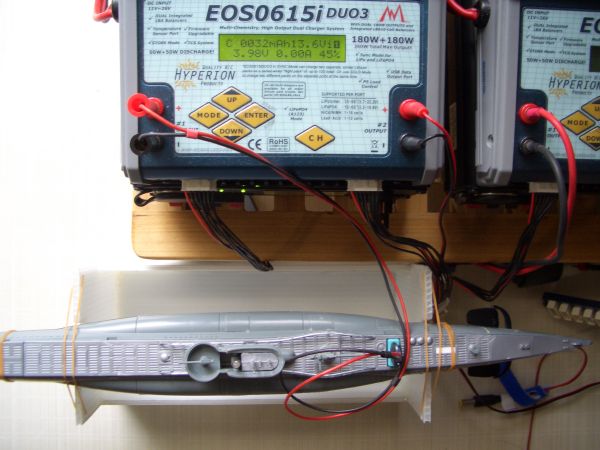
リポバッテリー Hyperion G3
550mAh 25C単セル x 2個
|

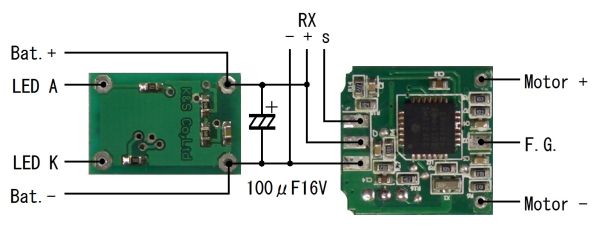
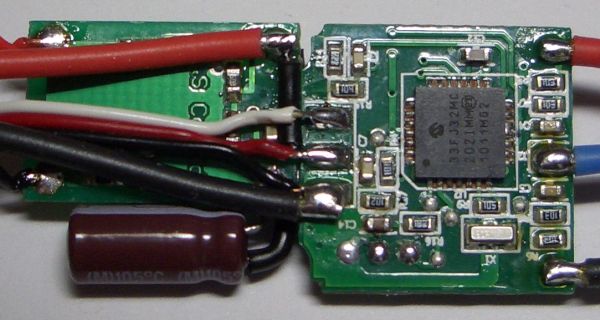
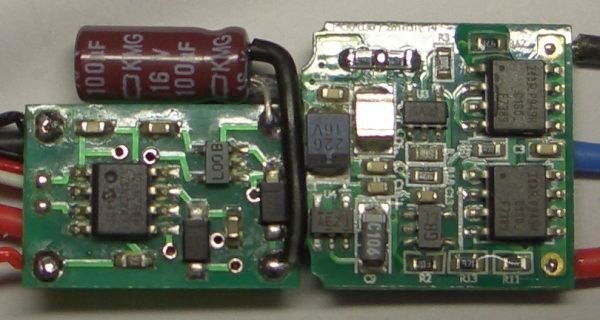
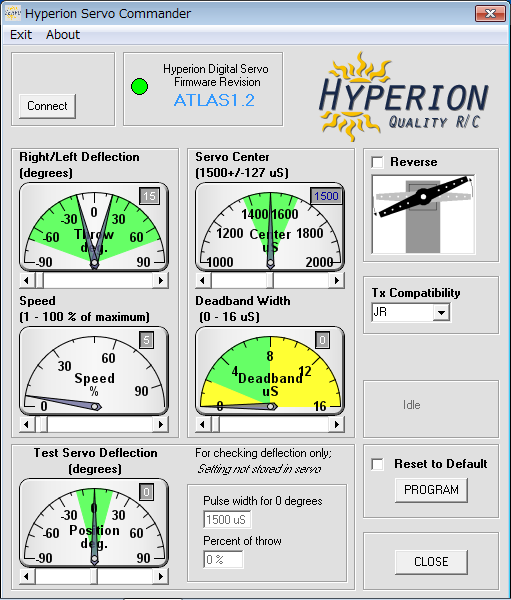
Hyperion DH20シリーズのサーボ。
ESCとして使用。
|
|

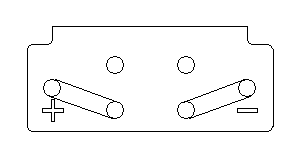
K&S製 リチウムポリマー用
オンボードバッテリーチェッカー KSJ2295
|

QRP製 リンケージロッド0.8mm。 No.60520
|
|

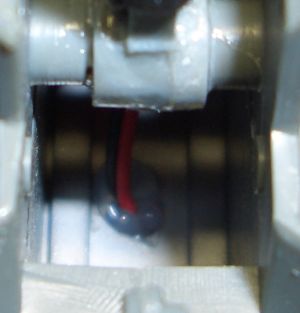
2x5x2mmベアリングと8x5mmホルダー。
T-REX450S用Tail pulley assembly
プロペラシャフトの軸受けに使用しました。
|
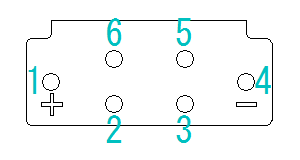
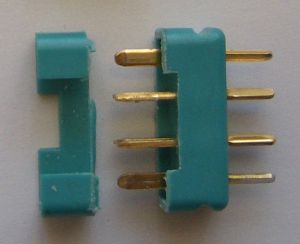
MPXコネクター。オス2個、メス1個。
充電およびスイッチ(ジャンパー)として使用。
|
|

Deans マイクロプラグ 2個。
電池コネクターとして使用。
|


おもりに使った鉛。
(上)直径10mmの丸棒。(下)2mm厚の板
できれば、1mm厚がほしかった。
|
|

防水ブーツ 5個 (3袋)
|

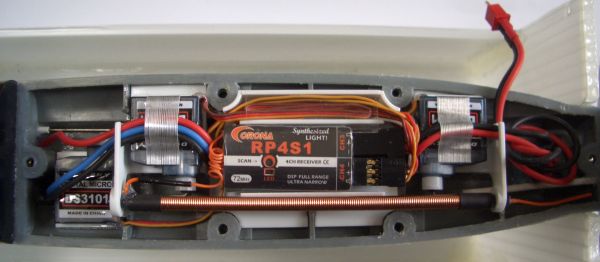
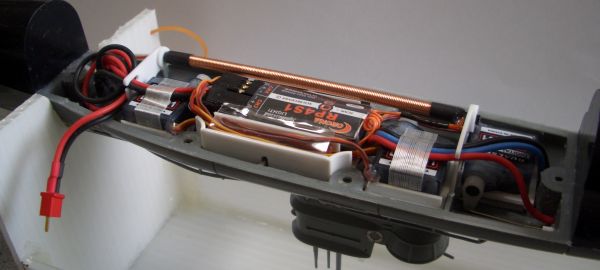
CORONA RP4S1
4ch FM-PPM受信機
|
|
【その他】
20AWGシリコンコード
0.1μF積層セラミックコンデンサ
10μF16V無極性電解コンデンサ
100μF16V電解コンデンサ
2.4kΩチップ抵抗
シュリンクチューブ37mm巾
【接着剤】
タミヤセメント
瞬間接着剤 OKボンドFX
バスコーク
両面テープ
ホットボンド
|
| |
|
|