オートジャイロ Cierva C-30 が完成しました。
オートジャイロは、RAD製ひまわりⅡ、フライングスタイロ製Cierva C-30、そして今回で3機目です。
いずれも飛行はできましたが、いまだに納得のできる操縦はできていません。
今回のCierva C-30はフライングスタイロのそれより2倍近く重量が重いです。重心位置や迎角なども不明です。
キットに組み立て説明書が付属していなかったからです。
オートジャイロとは
ヘリコプターのように回転翼機ですが、ローターには動力が付いていません。前からの風の力でローターが回転します。回転することで、固定翼機の主翼の働きをします。
舵は、サイクリックピッチコントロールではなく、回転面を直接前後左右に傾けて行います。
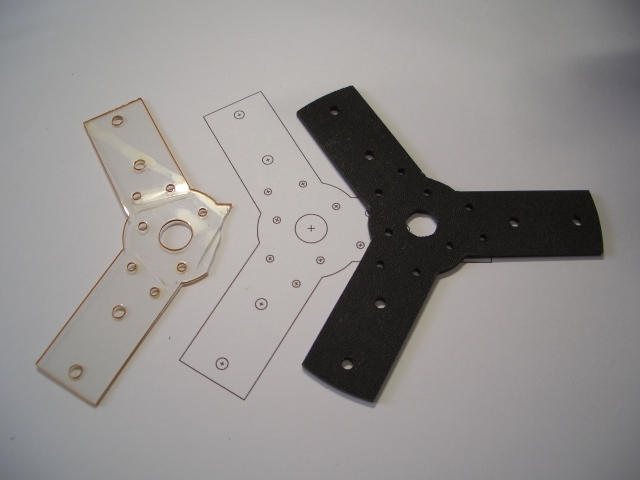
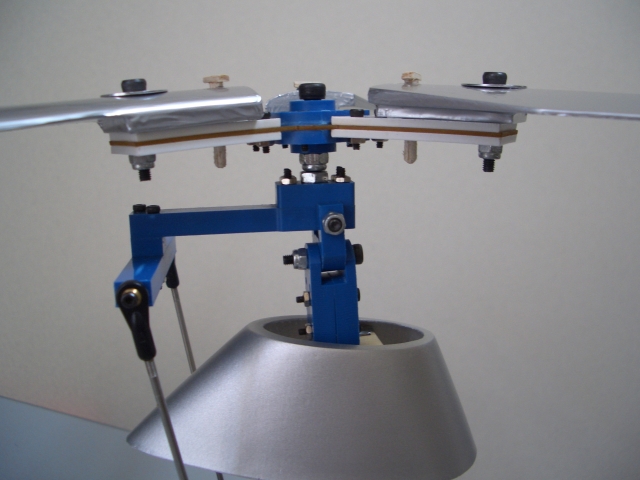
ローターヘッド部分です。
3枚のローターは、各2本のボルトで止めるようになっていましたが、墜落時の損傷を軽減するため、内側の1本はバルサ棒を差し込んでいます。

フラッピングダンパーになっていて、上下にしなります。
このモデルでは、ローターは反時計方向に回転します。
ローターの下から風を受けると、ローターは上にそり、マイナスピッチが付き、ローターは回転力を得ます。また、ローターは揚力を生みやすいような翼の形状(クラークY相当)をしています。
折り紙で模擬すると

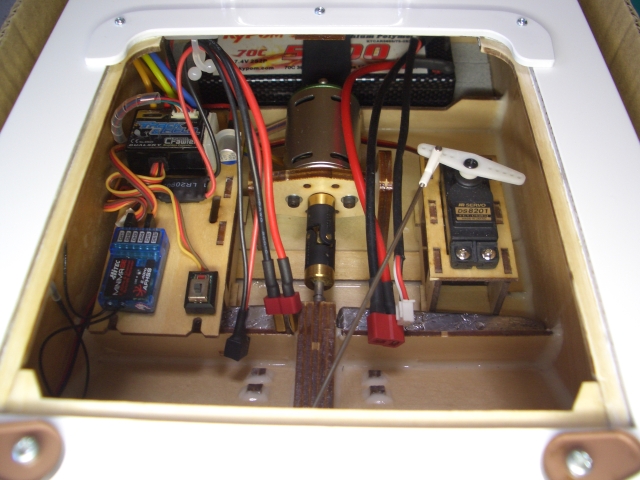
2個のサーボで、エルロン(左右)とエレベーター(前後)方向にヘッドを操作しています。プロポで、エレボン(デルタ翼)ミキシングをしています。
使用サーボはHyperion DS09-SMD(メタルギア)を使用しました。

ESCはHyperion TITAN 30A 、バッテリーはHyperion 3S 1600mAh 35C Li-Po を使用。
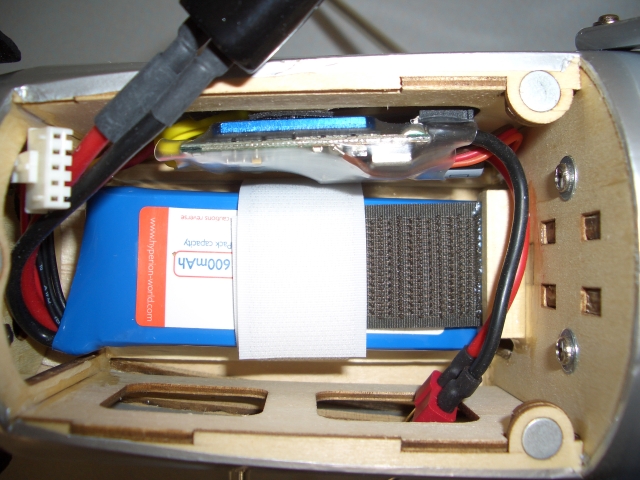
ラダーサーボはHyperion DS09-SMD、受信機はHITEC MINIMA6E(6ch)を使用。
受信機の横に貼り付けているのは、機体発見用ブザーです。

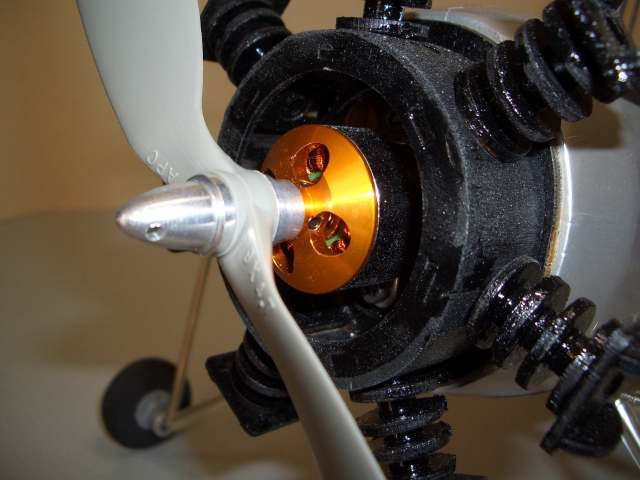
モーターはA2212-13 (KV値1000、極数12、マグネット数14)、プロペラは9x4.7を使用。
これで、最大電流12A、静止推力750gが得られました。とりあえず、これでテスト飛行する予定です。
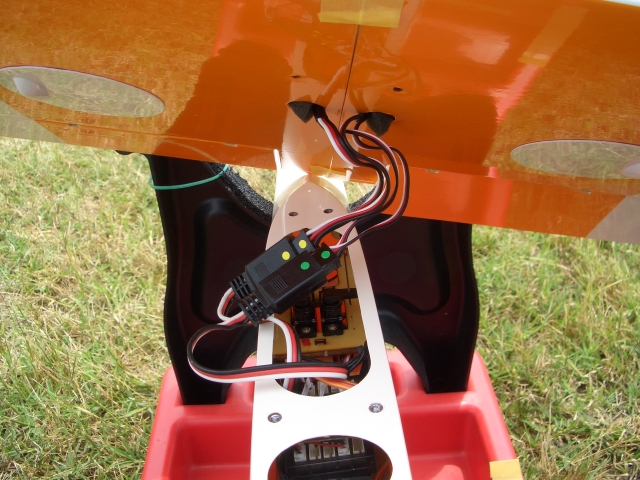
ラダー、尾輪のリンケージです。

前から見たらこんな感じです。ダミーエンジンは木製で塗装済み完成品でした。

これで、うまく飛ぶでしょうかね?
迎角は6.5度、水平方向の重心位置はマストの付け根付近です。
総重量は770gです。バッテリー140gを除いても、630gです。キットに書かれている飛行重量600gは、どう考えてもウソです。
風のある日にチャレンジしようと思っています。