PCM(パルス符号変調)、これは現在のラジオを除く、全てのテレビや音響・映像機器に共通した技術です。
標本化(サンプリング) ⇒ 量子化 ⇒ 符号化
といった、手順で、アナログ信号からデジタル符号に変換されます。
アナログ信号は、プロポのスティックの位置をポテンショメーターなどで電圧値にしたものです。
今後、ポテンショメーター(可変抵抗)から、エンコーダーに変更されるでしょうね。
エンコーダーにすると、直線性が向上し、経年変化や寿命もながくなります。
デジタルノギスなどはこれです。 また、プリンターも、昔はステッピングモーターでパルスによってヘッドの位置ぎめをしていましたが、現在は普通の直流モーターでぶん回しています。エンコーダー(帯状フィルム)で、現在位置を取得して制御しています。
標本化とは、一定時間ごとにスティックの位置を読み取ります。(まだ、アナログ値)
このときの標本化周波数は、サーボ周波数を50Hzとした場合、2倍以上の100Hz以上で行えばよいでしょう。
つまり、1秒間に100回読み取ることになります。
量子化とは、標本化で得られた値(アナログ値)を数値に変換します。
例として、2.54Vを1Vで量子化した場合は2、 0.1Vで量子化した場合は25、 0.01Vで量子化した場合は254となります。
つまり、細かな単位で量子化するほど、正確に情報が伝わります。
プロポの名前にある「1024」というのは、おそらく最大1024分割しているといった意味かも。
標本化周波数を高くしても量子化を多くしても、正確に伝わる反面、データ量が増えます。
符号化とは、量子化で得られた数値を「1と0」の符号(2進数)に変換します。
例として、 1024=210 ですから 最大10ビット(2進数10桁)が必要になります。
音楽CDの場合
標本化は44.1kHz、 量子化は16ビット と定めています。
しかし、プロポの場合は各社バラバラだと思います。
符号化された信号をそのまま送るのではなく、データ圧縮や誤り訂正符号を付けます。
このあたりが、各社独自の技術となります。
音楽CDでは、16ビットを上下8ビットずつに分け、8ビットに誤り訂正符号処理を行った14ビットとしています。EFM(Eight-to-Fourteen Modulation )といいます。
誤り訂正符号とは、そのデータが正しいかどうかを知らせる符号で、訂正能力は持っていません。
したがって、プロポのようなリアルタイム処理の場合、誤りデータは無視しているのだと思います。
音楽CDの場合、エラーデータは無視します。 コンピュータ用のデータCDの場合、1ビットでも間違っているとプログラムが正常動作しなくなるので、エラーが無くなるまで何回も読み直しします。(CRCエラーチェック)
インターネットのプロトコルにおいても、通常はTCP(エラーがあると、送信元にデーターの再送信を要求する)で、ボイスチャットや電話などの場合はUDP(エラーを無視する)を使っています。
無線通信では、不規則にたまにおきるエラー(ランダムエラー)はつきものです。
でも、スティックを1秒間に100回前後させる指の持ち主はいないと思いますので(笑)
データー圧縮技術ですが、この技術は日々進化しています。
いかに大量のデータをコンパクトにするかです。
音楽CDやWindowsのWAV → 圧縮なし
MP3やWindowsのWMAなど → 圧縮あり
画像WindowsのBMP → 圧縮なし
画像JPEGなど → 圧縮あり
動画(ビデオ)の場合は、ほとんど圧縮されています。
その方法も様々でCODEC(コーデック COmpression DECompression)と呼ばれています。
2時間映画が記憶できるDVDでも、無圧縮だと5分程度しか記憶できません。
映画DVDや地上デジタル放送はMPEG-2(ワンセグはMPEG-4)で、圧縮されています。
圧縮のプロセスが複雑になれば、それを元に戻すのに要する時間も多く必要になってきます。
しかし、コンピューターの処理速度の向上に伴い、圧縮過程も複雑になってきています。
圧縮方法は大きく2つに分けられます。
可逆圧縮 → コンピューターで扱う、数値、文章、プログラムなど。
非可逆圧縮 → 画像、音声など。一度圧縮すると元の品質に戻せません。
私こと、音楽CDを取り込むとき、昔はMP3などでしたが、最近は大容量記憶装置が安価なので、WAVで取り込んでいます。
話が、プロポからずれてしまいましたが、
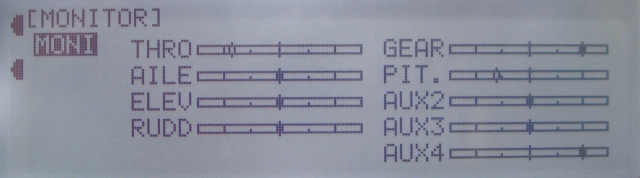
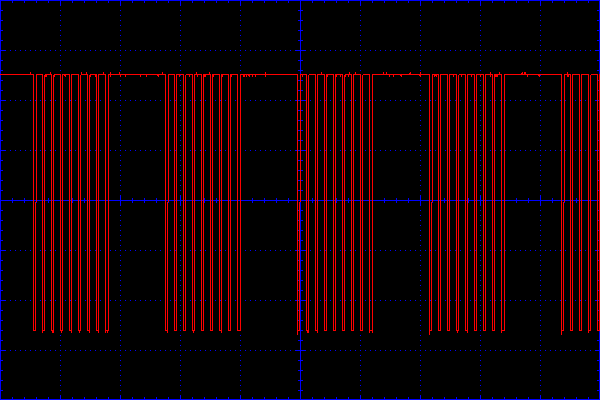
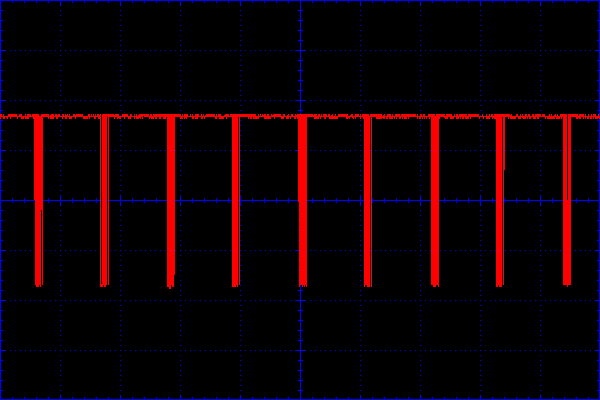
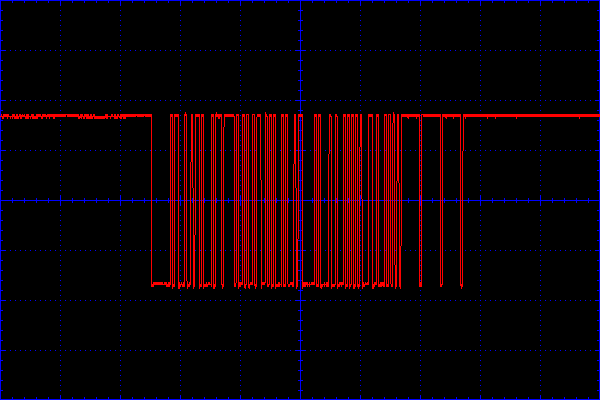
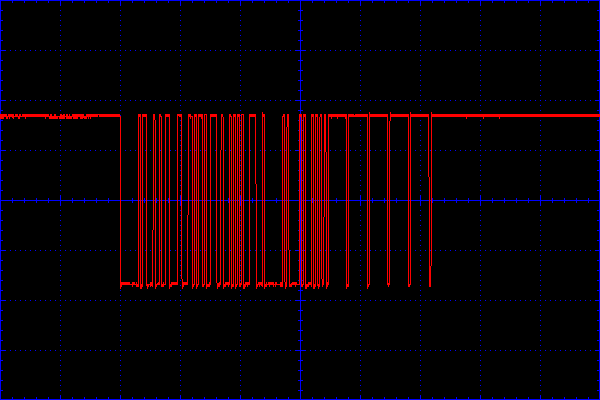
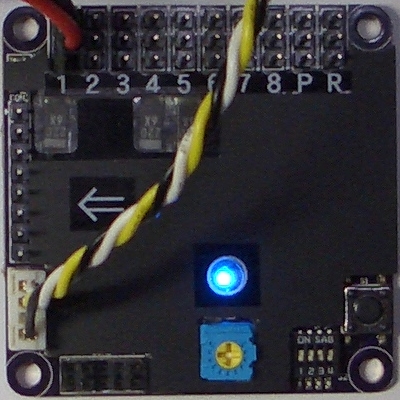
9ch送信機(X3810)のPCM出力波形です。
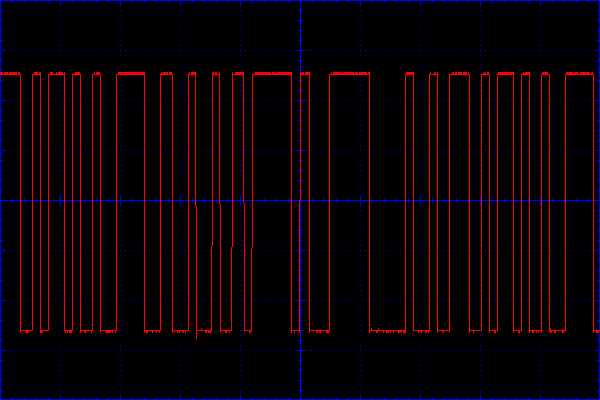
これは、ワンショット画面です。たえず変化しています。
これを見ても、素人の私には何もわかりません。
符号ですから、1と0とを表現しているには違いありません。
もし、NRZ(Non Return to Zero)方式だと、上が1、下が0です。幅が広い部分は1や0が連続しています。ただし、極性が逆だと、上が0、下が1となります。
NRZI方式だと、1の時は反転、0は反転しない。なので、極性は関係なくなります。
LANなどで採用されているバイフェーズ方式だと、0を"10"、1を"10"などとする位相で伝えていますから極性が関係します。
上記以外にたくさんの方式がありますから、(伝送方式がわからない限り)この波形から1と0すらわかりません。
この信号をRFモジュールで電波に乗せます。
波形が方形波なので、高調波成分を多く含みます。そのため、ローパスフィルターを使って、正弦波(基本波)とします。波形の角を丸くするわけです。
FM変調では、信号波により搬送波の周波数を変化させます。±Δfだけ変化させるとします。
そして、信号波の最高周波数をfsとすると、占有周波数帯域幅(チャンネルの幅)fm=2×(Δf+fs)となります。
40MHz帯や72MHz帯では各チャンネル間は20kHzと決まっています。
したがって、占有周波数帯域幅は20kHz未満としなくてはなりません。実際には、隣接したチャンネル間での混信を防ぐため、20kHzよりかなり少な目に設定しています。(電波法で定めていると思います。)
転送速度を上げる(時間当たりのデータ量を増やす)とfsの値が大きくなり、制限されます。
PCMの毎秒のデータ量は、標本化周波数×量子化符号ビット数×チャンネル数 となります。
つまり、操作時の応答速度を上げても、スティックの分解能を上げても、チャンネル数を増やしても、データ量は増します。
占有周波数帯域幅を増やすことなく、データ量を増やすには、データ圧縮技術や変調方法を考えなくてはいけません。
参考語句 FSK(Frequency Shift Keying) PSK(Phase shift keying)
地上デジタル放送では、4-PSK(一回の変調で2ビットを表現)、OFDM(Orthogonal Frequency Division Multiplexing 直交周波数分割多重)が採用されています。
また、無線LANの規格802.11nにはOFDMが採用されています。
というわけで、PCMプロポに関する規格はまったくわかりません。
私がJRプロポを愛用した理由は、他社製品と比べて混信に強かったからです。
何でも「ABC&W SYSTEM」ってのが、優れものか?複数のプロポが同一チャンネルでも、操作できました。
このABC&W SYSTEMも、正体が不明のままです。
2.4GHzになってから、HITECのAurora9をよく使うようになりました。受信機がJRの1/3の価格です。
機能が充実していますし、柔軟性に富んでいます。
2.4GHzでは混信が無い? 実は(アナログ的に考えると)混信だらけで使っているのです。
(更新中)