買っちゃいました! 完成機。
一言「よくできています」
いままで、自作に投資したお金は何だったんだ!? って感じです。
答えは「授業料」でしょうね・・・トホホ。

最初に説明書を読め ・・・ って感じ!(教訓)
送信機の電源がONできない ⇒ 1回押しの後、2秒間の長押し。 機体側も同じ(こちらは英文で明記されていた)
スマホにアプリ「DJI Pilot」をインストールし、USBケーブルで送信機に接続し、送信機⇒機体の順に電源をON、ちゃんと通信できた。
この機種には、DJI Light Bridge が内蔵されているそうです。
CSCコマンドで、モーターが回らない!!
送信機の設定がモード2になっていたのでモード1に変更。 日本仕様ならモード1に設定して出荷してほしいですね。
NAZAと違い、スティックを「ハの字」または「逆さハの字」にしないと起動しない。 NAZAなら右下、右下でもOKだった。
コンパスキャリブレーションを行った。
でも、回らない。


CSCを行うと、「IMU初期化中・・・・・お待ちください」と表示される。
いつまで待っても、同じ・・・
そこで、IMUキャリブレーションを行ってみることにしました。
予想が的中し、無事モーターが回り、庭先での初フライトが成功しました。
以下、IMUキャリブレーションの手順を示します。
「MODE P-GPS」 をタップします。 ⇒ MCパラメータ設定
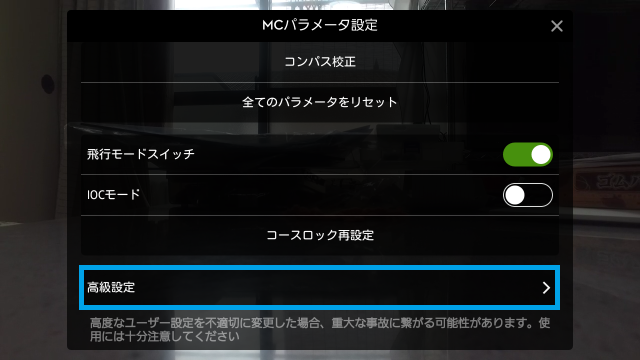
「高級設定」 ⇒ 「センサー」 の順にタップします。
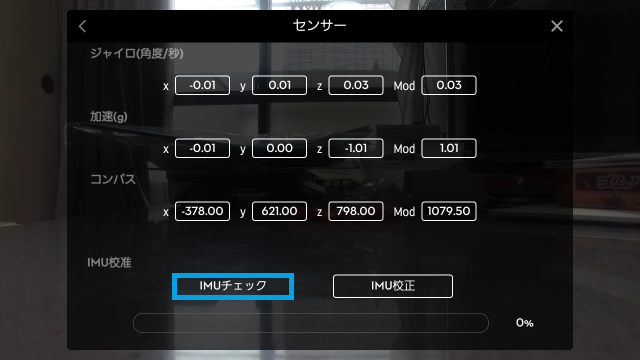
「IMUチェック」をタップします。 おそらく「校正必要、・・・」と表示されます。
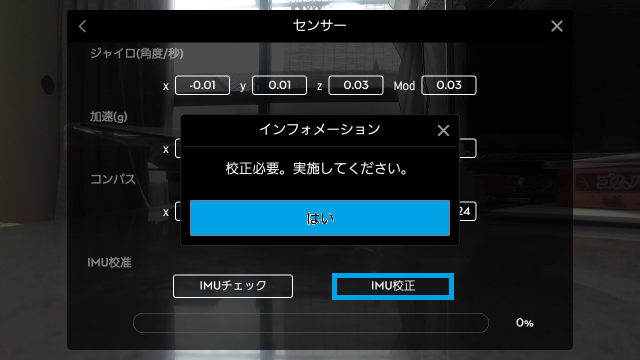
「はい」をタップし、続いて「IMU校正」をタップします。
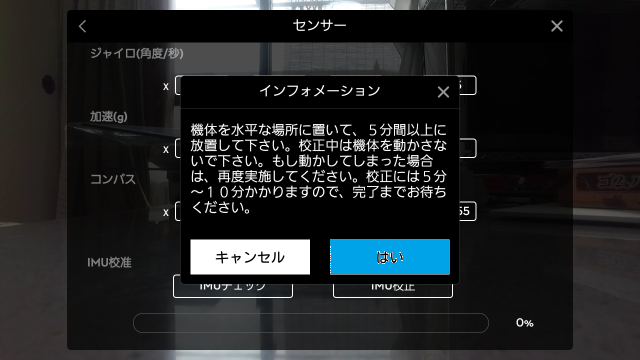
「はい」をタップします。
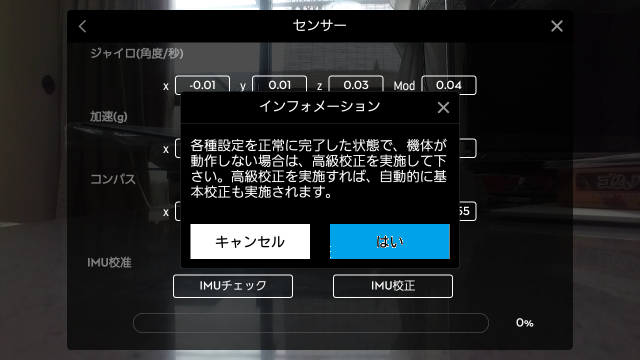
「はい」をタップします。 ⇒ IMU校正が始まります。
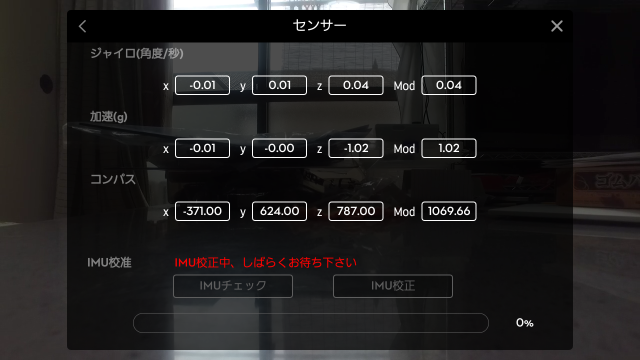
校正中は、機体に振動を与えないように注意してください。 進捗バーに気を取られず、気長に待つ方がよいかも・・・
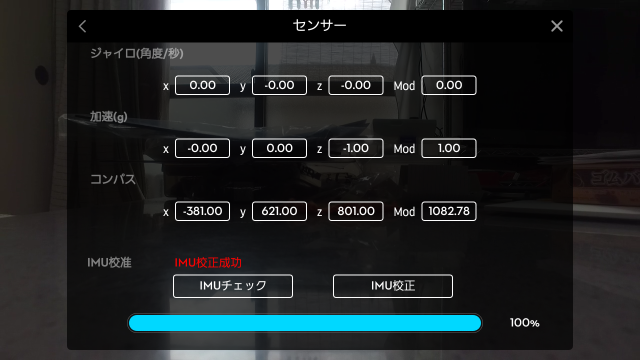
進捗バーが100%になり、「IMU校正成功」と表示されれば完了です。
「機体ステータス一覧」 アプリが通信を開始したときに表示されます。確認後、Xで閉じます。
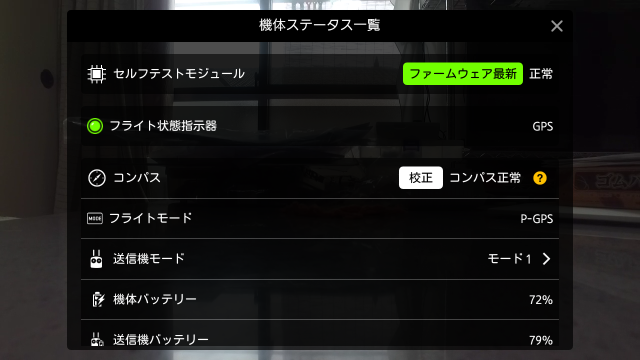
スマホとの相性か? アプリのバグか? 以下のメッセージが頻発します。

充電器について
付属の充電器です。 しかしながら、これは単なるスイッチングタイプの定電圧電源です。
バランス充電回路は、バッテリーに内蔵されています。

車で充電するにはどうするのが良いか、思案中です。
・200Wクラスのインバーターを用いて、そのまま使う。正弦波タイプでなく、安価な方形波タイプでOK、というか方形波の方が良いかも・・・
スイッチング電源の入力なので、直流100VでもOKだと思う。
・写真の赤線で切断し、コネクターを挿入。 でもって、DC-DCコンバーターを製作する。
12V⇒17.5V(昇圧) または、 24V⇒17.5V(降圧)
この機体のプロペラ軸には、サイドスラストが付いています。

写真中央のモーターは、機体を上から見てCW(時計方向)です。 右に2°傾いています。
機体の中心から見た時
CW(時計方向、右回り)のモーターは左に傾き、
CCW(反時計方向、左回り)のモーターは右に傾いています。
機体中心に向かって傾いたマウントは、以前から知っていましたが・・・
この機体は、その傾きは0°です。
感想
小さいのに、安定しています。 操縦感もGOODです。
ラダー(ヨー軸方向)舵を打った時の上下(上昇下降)変動は、まったくありません。
自作機体も、調整次第で、ここまでできるのか、チャレンジしてみます。
ジンバルは3軸必要みたいですね。
撮影された映像をみたら、ヨー軸方向にスムーズかつ安定している。
ヨー軸方向にはジャイロのみでなく、ラダー操作がミキシングされています。
映像にブレ(振動)が、まったくない。
モーター振動を除去するのは大変です。いろいろ苦労しましたが、未解決のまま・・・