Naza-M Assistant Software v2.14がリリースされました。
Naza-M V2も同じアプリです。
ファームウェアはアシスタントソフトウェア経由でダウンロード・インストールされます。
http://www.dji-innovations.com/download/naza-m-downloads/
(リリースノートを和訳)
● ファームウェア
✔ Zenmuse H3-2Dジンバルとの互換性を最適化しました。
✔ X1チャンネルのキャリブレーション機能を追加しました。
(X1チャンネルは、ノーマル・ジンバルおよびZenmuse H3-2Dジンバルのピッチ制御に用いられます。)
✔ デフォルトの航空機タイプをI4に代わってX4に変更しました。
● ソフトウェア
✔ X1チャンネルのキャリブレーション機能を追加しました。
(X1チャンネルは、ノーマル・ジンバルおよびZenmuse H3-2Dジンバルのピッチ制御に用いられます。)
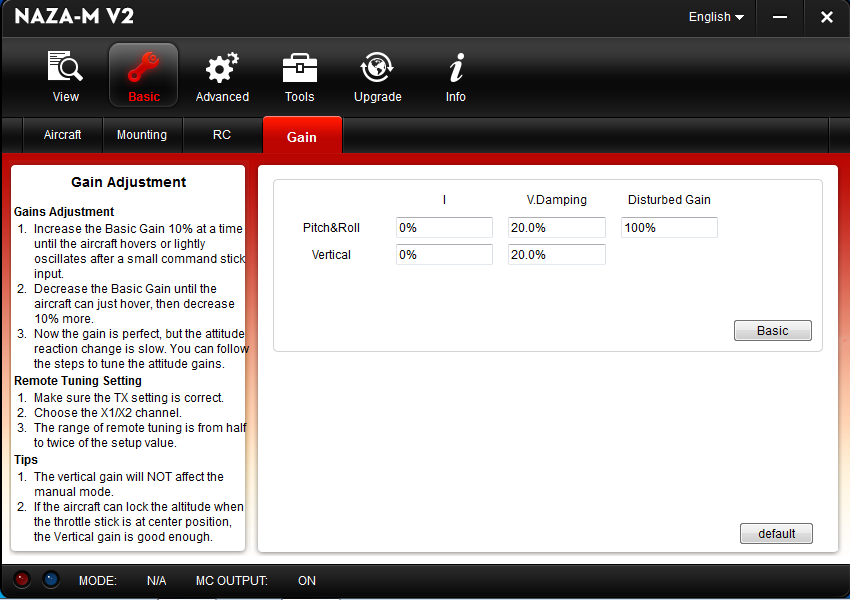
次のGain項目にAdvaced が追加されました。
コメント (16)
V3.12と比べて、どぉ~変わったのかを楽しみにしてます。
私の様に、認識するまで時間が掛かり過ぎるのを対策したのなら
グーですね。
今の私のMCの状態が改善されるのなら・・・
なお更、ベリーグーですね。
投稿者: 敏ボー | 2013年07月04日 20:47
日時: 2013年07月04日 20:47
はじめまして。
今回Naza-MV2搭載したクワドを製作するにあたり大変参考にさせていただきました。
設定にあたり質問がありますので宜しくお願いします。
飛行しましてホバリングでスロットが中立でなく少しうえになりましたので
バーチカルゲインで調整しましたが最大値の250でも中立になりません。
この場合プロポのスロットカーブで調整してもNazaには影響はないのでしょうか。
最大にしてもだめな場合ペィロードが多すぎるのでしょうか。
ディアルレート、エキスポなども設定しても影響はないのでしょうか。
なお、ステックキャブレーションは確認済みです。
宜しくお願い致します。
投稿者: たけだ | 2013年07月20日 11:05
日時: 2013年07月20日 11:05
管理者の「まーぴー」と申します。よろしくお願いいたします。
(ご存じとは思いますが)
Normalモードにおいては、中立で高度を維持しません。ペイロードやマルチローターの
パワーに依存します。
Atti.モードおよびGPS Atii.モードでは、
スロットルスティックが中立で、ペイロードなどに依存せずに、その高度を維持します。
たとえば、スロットルをHighにすると上昇し、高度50mで、スロットルを中立にすると、高度50mを維持し、スロットルをLowにすると下降し、高度5mで、中立にすると、高度5mを維持します。
(私の経験では)
バーチカルゲインを大きくすると、(高度が変化するのではなく)スロットルを中立にしたときの止まりがよくなるようです。
ペイロードに対し十分なパワーがあれば、バーチカルゲインを最大値まで上げることができました。
ペイロードが大きい機体では、バーチカルゲインを上げていくと、急激なスロットル操作時に「ビ・ビ・ビィーン」とモーターがうなりだします。
すいませんが、いくつかご質問いたします。
・「少しうえ」という表現がありましたが、いかほどでしょうか?
スティックの目盛では? パルス幅? %では?
・Naza-M v2 Assistant Software v2.14 をお使いですね?
・ステックキャブレーション後、Assistant Software の View 画面でも、各スティック対カーソルの動きを確認されましたか?
Q. この場合プロポのスロットカーブで調整してもNazaには影響はないのでしょうか。
A. OKです。私は、ニュートラル付近を平らにしています。
Atti.モードにおいては、気圧センサーにより、高度を自動調整しております。
パワー不足でないかぎり、ニュートラル位置で高度を維持します。
したがいまして、NAZAがニュートラルとして記憶している信号(パルス幅)が、
お使いのプロポのスティック中立位置と異なっているとしか思えません。
今一度、Assistant Software の View 画面において、スロットルスティックを動かして、カーソルが緑になる位置をご確認ください。
投稿者: まーぴー | 2013年07月20日 17:25
日時: 2013年07月20日 17:25
まーぴー様
ご回答ありがとうございます。
質問での回答ですが、・Naza-M v2 Assistant Software v2.14 を使用しています。
またプロポのステック位置ですが中立の位置から上に3メモリありますが上に1メモリになります。
バーチカルゲインですが250が限度で250ですと「ビ・ビ・ビィーン」とモーターがうなりだしたので
只今230です。
Assistant Software の View 画面において、スロットルスティックを動かして、カーソルが緑になる位置をご確認ください
とありましたが、確認いたしましたがすべて中立で緑です。
プロポのスロットカーブで調整して大丈夫ということでしたので、中立の50%を60%に変更しましたら
ほぼ中立付近でホバリングしてました。
このような設定で大丈夫でしょうか。
宜しくお願い致します。
投稿者: たけだ | 2013年07月20日 22:36
日時: 2013年07月20日 22:36
たけだ様
私は、Naza-M v2を持っていないのですが、おそらく、NAZA-Mと同じだと思います。
私の場合は、NAZA-MもNAZA-M Liteも、ちょうど50%位置で高度が一定しています。
Cut Off Typeに、IMMモードとIntelligentモードとがありますが、私はIntelligentモードを使用しています。
スロットル60%位置で高度が一定するのは、少し問題が残っているような気がいたします。
・各ESCのキャリブレーション(スロットルレンジ)はOKでしょうか?
スロットルのニュートラル点(50%位置)をESCの下限位置に設定しておられた方がいらしたもので。
・バッテリーが満充電から、時間経過とともに、高度が低下(スロットル位置が上に移動する)することは、ありませんか?
⇒ 低電圧保護が働いている。 VOLTAGE MONITOR、ProtectionSwitchを「OFF」にしてテストしてみてください。
以上、問題なければ、もしかして、そのような仕様かもしれません。
投稿者: まーぴー | 2013年07月21日 00:14
日時: 2013年07月21日 00:14
まーぴー様
お世話様です。
設定のほうですが、Cut Off TypeはIMMモードでしたので
Intelligentモードを試して見ます。
ESCですが、エンルート扱いのマルチ専用で設定なしにそのまま
使えるとのことでした。
VOLTAGE MONITOR、ProtectionSwitchはOFFの設定です。
ひとつ気になる点があるのですがESCからMCに繋ぐ線の赤の線ははずしたほうが
いいのでしょうか、
もう一度、設定他を見直してみます。
もしこのような仕様でしたらスロットカーブで中立になるよう
プロポで設定しても大丈夫でしょうか。
宜しくお願いします。
投稿者: たけだ | 2013年07月21日 21:15
日時: 2013年07月21日 21:15
たけだ様
Intelligentモードをお勧めします。こちらの方が安全です。
ESCの赤線(BEC出力)ですが、私は全て接続しています。
赤線は+5Vですが、出力電圧が若干異なります。それらを並列に接続した場合、
電圧(電位)の高い方から低い方へ電流が流れます。
つまり、BEC出力電圧の最も高いESCに負担がかかります。
さらに、そのESCのBECに使われているレギュレーターICの温度特性が正の場合、さらに1つのESCに負担がかかります。
私の場合は、NAZA付属の電源装置(スイッチングBEC)の電圧が、他のESCのBEC電圧より高かったので、全て赤線を接続しています。
テスターをお持ちでしたら、測定してみてはいかがでしょうか?
マルチローターに電池を接続した状態で、飛行させず、5分以上放置してみて、
(手で触ってみて)ESCの温度を調べてみてください。もし、熱くなっているESCがありましたら、
そのESCの赤線を外すとよいでしょう。
(空撮などで)他に消費電力の大きなサーボなどを使用しないのであれば、全てのESCの赤線を外しても構いません。
説明書に「全てのESCの赤線を外してください」などと書かれている理由は、
ユーザーの中には、電気理論に詳しくない人もいる、という前提で書かれています。
いずれにせよ、本件(スロットルのニュートラル)とは、まったく関係ないと思われます。
(補足・余談)
ESCにおいて、OPTO = BEC無 と認識しておられる方を多く見かけますが、
本来、意味的には異なります。 OPTO とは、フォトカプラなどを使用して、
動力系(モーター、ESC)と制御系(受信機、サーボなど)とを電気的に絶縁する、という意味です。
結果、OPTOタイプのESCはBEC無となりますが。。。(笑)
・ホバリング飛行中に、スロットルスティックが定位置で、高度が一定する。
・スロットルをハイにすると上昇する。
・ゴーホーム&ランディングが正常に動作する。
であれば、現状のまま、使用してOKだと思います。
的確な回答になっていなかったら、ご容赦ください。
投稿者: まーぴー | 2013年07月22日 02:04
日時: 2013年07月22日 02:04
まーぴー様
ご回答ありがとうございます。
具体的なご説明で大分理解できました。
何回か飛行してますが、参考に確認しながら
セッテングを進めたいと思います。
ちなみにまだ、ゴーホームはやっていません。
これからも参考にさせてもらいますので、
宜しくお願い致します。
ありがとうございました。
投稿者: たけだ | 2013年07月22日 10:41
日時: 2013年07月22日 10:41
たけだ様
うまくいくといいですね。
ただ、「スロットル60%で高度一定」には、ややひっかかります。
皆さんの参考になると思いますので、結果報告をよろしくお願いいたします。
ゴーホーム実施の際の注意点
・自分の車の近くで、マルチコプターにバッテリーを接続しないでください。
ホームポジションとして設定されます。(笑)
・半径2.5mの誤差を考慮してください。
IOC機能も使ってみてください。
IOCスイッチ操作で、(飛行中において)ホームポジションの変更が可能なので、
IOC機能は不要と感じても、IOCスイッチは残しておかれてもよいと思います。
それでは、また
投稿者: まーぴー | 2013年07月22日 12:08
日時: 2013年07月22日 12:08
まーぴー様
設定の件了解いたしました。
ありがとうございました。
投稿者: たけだ | 2013年07月22日 21:56
日時: 2013年07月22日 21:56
まーぴー様
お世話様です。
いろいろ設定やペイロードを軽くしてやりましたが同じ症状です。
スロットカーブを60%で中立でホバリングして23アンペアでした。
当方の機体は飛行重量は2キロでペイロードは1キロです。
モーター 2828-940KV
アンプ 30アンペア
プロペラ 10×5.5 カーボンペラ
当方の機体はクワドでペイロードがぎりぎりですので
プロペラを11×5.5に変更するとどうでしょうか。
アンプが30Aですのですので。
プロペラを購入して確かめればいいのですがカーボンペラですので
結構な値段になります。
宜しくお願いします。
投稿者: たけだ | 2013年07月28日 18:52
日時: 2013年07月28日 18:52
たけだ様
すいません。サーバーのメンテナンスをしていました。
主はフィルター類の交換です。カチてボロボロになっていましたので。。。
いろいろ参考資料を頂き、ありがとうございます。
飛行重量を変化させても、ホバリング時のスロットル位置が変わらなければ、
ちゃんと自動制御されているので、問題ないと思います。
飛行重量が3kgを超える場合は、ヘキサ(6ローター)をお勧めします。
プロペラの1インチUPは、かなり負荷が増加します。
(おおよその目安ですが)負荷で考えた時、ダイヤ1はピッチ2に相当します。
よろしければ、使用バッテリーを教えて頂けませんでしょうか?
投稿者: まーぴー | 2013年07月28日 19:26
日時: 2013年07月28日 19:26
まーぴー様
ご連絡ありがとうございます。
飛行重量の件了解致しました。
使用しているバッテリーは3セル、4000と5000mAhになります。
5000のほうで2Kぐらいです。
宜しくお願いします。
投稿者: たけだ | 2013年07月29日 01:11
日時: 2013年07月29日 01:11
たけだ様
おはようございます。
3セル、4000と5000mAh をご使用とのことですので、電流容量は十分ですね。
ところで、3セル5000mAhなどの大容量バッテリーはどこで入手されましたか?
私も探しているのですが・・・
現在、KYPOM3セル3700mAhを2個並列で使っています。
個人的には、4セル、5セルは使いたくなく、
モーターのKV値を半分にして、6セルを使いたいです。
スロットル60%でホバリングについては、
V2の仕様でしょうかね!? V1とファームウェアが異なるのでしょうかね?
私は、同じだと思っていたのですが。。。
アシスタントソフトウェア経由で、ダウンロードされるので、不明です。
もし、NAZA-M V2 をお使いの方がいらっしゃいましたら、その点をリポートしていただけると、ありがたいですね。
投稿者: まーぴー | 2013年07月29日 09:09
日時: 2013年07月29日 09:09
まーぴー様
お世話様です。
バッテリー、スロットの件了解いたしました。
この状態で飛行、確認してまた何かありましたらご連絡いたします。
また、バッテリーですが当方経験が浅いので経験者の方からHyperionがいいと進められ、
R/Cネットショップ、ロビンから購入しています。
当方が探した範囲では安く注文してからの対応も迅速です。
飛行機がメーンですが。
また、宜しくお願い致します。
投稿者: たけだ | 2013年07月29日 23:31
日時: 2013年07月29日 23:31
たけだ様
お尋ねしたおいて、大変恐縮なのでですが、
KYPOM製3S 5100mAh 35C を注文いたしました。
購入先は、「マトリクス」です。
少し前まで、3S 3700mAhまでしか在庫がなかったので、あきらめていたところです。
ROBINも、よく利用しております。
Hyperion製は高価ですが信頼がおけます。私も、多数所有しております。
しかし、最近は、他にも、比較的安価で高性能なバッテリーがあることに気づきました。KYPOM製も、その一つです。
「マトリクス」のアドレスです。
http://www.rc-matrix.com/
投稿者: まーぴー | 2013年07月29日 23:46
日時: 2013年07月29日 23:46