アナログサーボは、サーボ信号を積分して電圧値(アナログ)とし、ファイナルギヤに接続されたポテンショメータ(可変抵抗器)からの電圧値(アナログ)と比較して、フィードバック制御をしています。
デジタルサーボは、サーボ信号(パルス幅)を数値に変換し、また、ポテンショメータからの電圧もA/D変換を行い数値に変換し、数値同士で演算処理を行います。
アナログサーボでは、アナログのコンパレータ(オペアンプなどの比較器)で行いますので、信号電圧値とポテンショメータの電圧値とが近づけば、出力(モーターへ加える電圧)が小さくなります。
つまり、少しずれてから、モーターに力が入り元の位置に戻そうとします。結果、保持力が弱いというか、外力を加えた時、ふにゃって感じになりがちです。
実際には、汎用オペアンプなどではなく、専用ICが使われます。
一方、デジタルサーボでは、数値で比較しますから、1でも差が出れば全力で元に戻そうとします。というか、そのような処理もできますし、それとは逆に保持力を犠牲に省電力化をはかることもできます。
実際にデジタルサーボをばらしてみたところ、目標値に近づいたら、8~10段階くらいでパワーを段階的に絞っていますね。全てのデジタルサーボがどうかはわかりません。
デジタルサーボでは、CPUで処理しますので、さまざまな処理が可能となります。
実際に行っているかどうかは知りませんが、エラー処理なども可能です。
たとえば、 入力信号が、 10 12 14 100 ・・・と変化した場合、100はエラーじゃないの?と疑って、とりあえず14の位置で止めておき、次のデータも100なら、やっぱり100でよかったのか。ということで100の位置に移動させる。 など
現在市販されているプログラマブルデジタルサーボで設定可能な項目
・ニュートラル位置
・左右の最大舵角調整(エンドポイント)
・動作スピード。ただし、サーボの性能以上のスピードはでません。引き込み脚用にゆっくり動かすなど。
・リバース設定
・デッドバンド幅
・フェイルセーフ
・保持力と省電力でどちらを優先するか
サーボのニュートラル位置やエンドポイントの修正で、ある程度はサーボの個体差を少なくすることは可能です。
しかし、直線性(入力信号に対するサーボの動作角度が正比例しているか)は、現在主流の可変抵抗器ではなく、新しいエンコーダー方式でないとだめですね。
<HITECデジタルサーボ用プログラマー>
インターフェイスHPP-21を使います

設定画面です。 設定項目が豊富です。
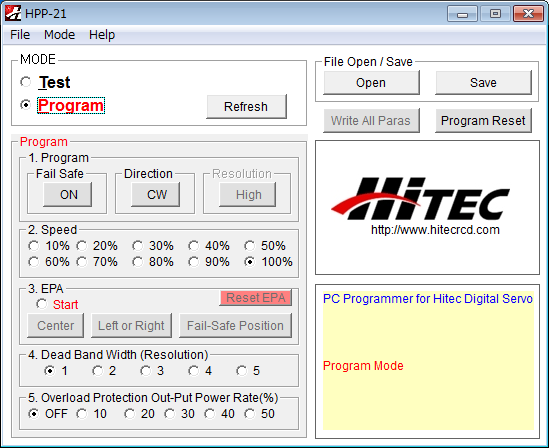
ニュートラル位置、左右独立のエンドポイント、フェイルセーフの位置は、画面左のスライダーで調整後、ボタンをクリックします。
全てがパルス幅で表示されないので、慣れるまで迷いました。
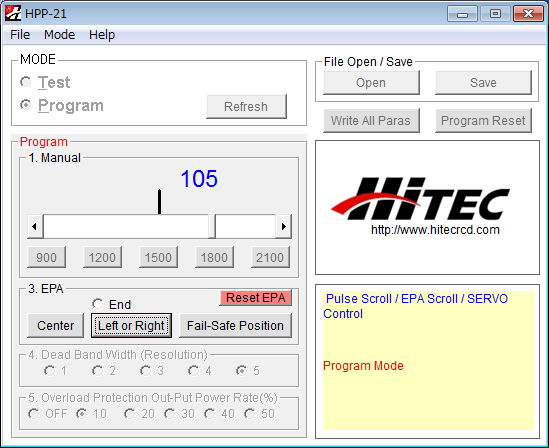
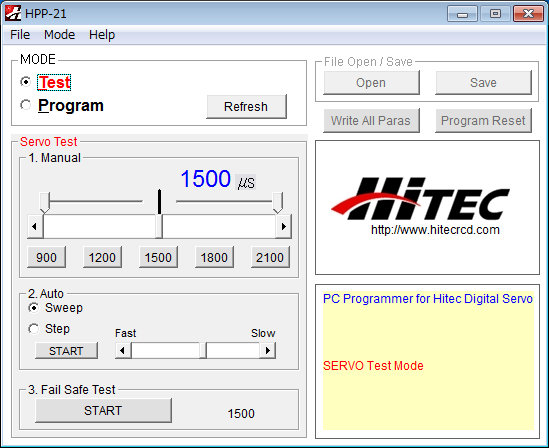
サーボテスター機能も付いています。ステップモードやスイープモードなど多彩です。しかも、アナログサーボ(他社製品でもOK)もテストできます。優れ品です。
HITEC RCD USA
http://www.hitecrcd.com/
HPP-21用ソフトウェアのダウンロード
http://hitecrcd.co.kr/tester/hpp_21.htm
<Hyperion ATLASシリーズ用サーボ プログラマー>
インターフェイス HP-AT-PRGUSBを使います。

HITECに比べて、設定項目が少ないです。
サーボテスター機能は、使い物になりません。 アナログサーボには非対応。
設定画面です。
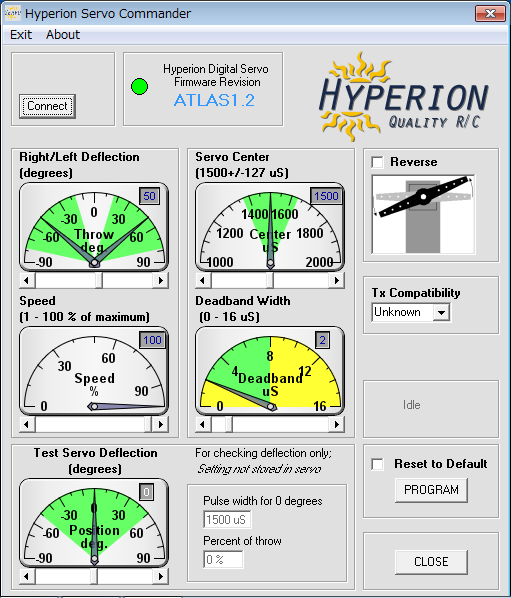
設定変更後は、すぐにテストしてみたいものです。
そこで、サーボテスターとの切り替えスイッチハーネスを自作しました。
Hyperion World
http://hyperion-world.com/
Hyperion PC Software
http://media.hyperion.hk/dn/pc/pcsoft.htm
やっぱり、プログラマブル デジタル サーボは便利です。
・リバース設定。エレベータやフラップの左右にサーボを配置する場合など。
・ニュートラル位置の微調整。プロポで行うより、サーボで行っていた方が、後々便利。
・スピード調整。引込脚用に、ゆっくり動くようにする。プロポで行った場合、スイッチON時に、いきなり高速で動いたりする。
私は、小型サーボにHP-DS-09シリーズを愛用しています。
<HITEC製品について、疑問に思う点>
・サーボプログラマーの設定画面からして、ニュートラルは1500μsのような気がします。
・受信機のフェイルセーフのデフォルトが1500μsとなっている。
なのに
・送信機Aurora9のニュートラル信号は1520μsです。