オートジャイロが即墜落したらと思い、T-REX500Eを持って行きました。
先日、このT-REX500Eの受信機をRD931からRD731に換えたので、テストフライトも兼ねています。
空撮用のヘキサコプターのチャンネル数が不足したため、このT-REX500Eと受信機を交換しました。
なんと、このRD731はニュートラル信号のパルス幅が1524μsecで、+24μsecもずれています。
3軸ジャイロMicroBeastは、電源投入後ニュートラル信号を自動検出するので、影響を受けるチャンネルはスロットル、ピッチ、ジャイロ感度(AUX2)のみでしたが、一応すべてのチャンネルのニュートラルを1500μsecにサブトリムで調整しておきました。
(仕様)
スワッシュサーボ: ALIGN DS510M
ラダーサーボ: JR DS3500G
ジャイロ: Micro Beast
ESC: Castle ICE-75 ガバナーsetRPMモード
バッテリー: 22.2V 3300mAh 35C


フライト動画です
普通に飛ばすだけ。3Dフライトとかは技術がないので出来ません。
実は、手放しで直線飛行している場面もあります。このMicro Beastは頭上げを抑制してくれるようです。
ところで、
このESC Castle ICEシリーズをガバナーsetRPMモードで使ったとき、いきなり回りだすと危険です。 また、一度スロットルを最低にすると元の回転数に復旧するまで、かなり時間がかかります。
このESCには、(操作量-制御量間で)ヒステリシスがあることに気づき、うまく利用しました。
NORMALモードの時だけですが、
モーターを始動するには、
HOLDスイッチON ⇒ (始動ビープ音) ⇒ HOLDスイッチOFF ⇒ スロットルスティックを上げる
一度モーターが回転を始めたら、スロットルスティックを最低にしても一定回転数を保持する。
モーターを停止するには、HOLDスイッチをONする。
といった動作です。
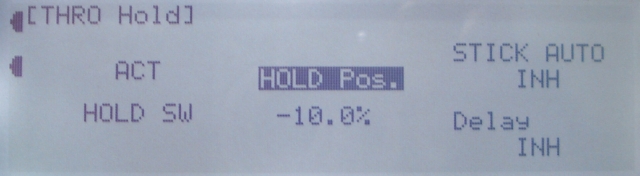
HOLD Pos.はESCが始動ビープ音を出す値より、わずか低い値に設定する。
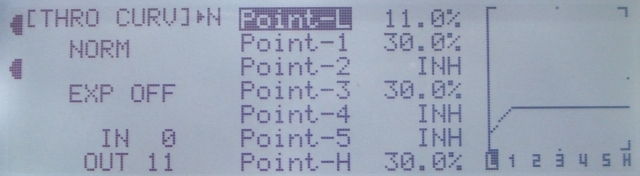
NORM時
スロットルカーブのPoint-Lを、モーターが回転を始める値とモーターが回転を停止する値の中間点に設定する。
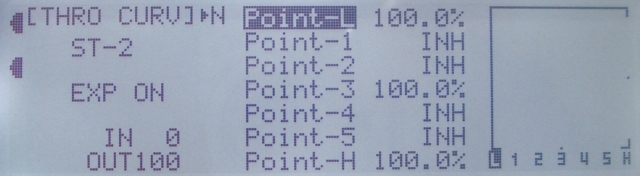
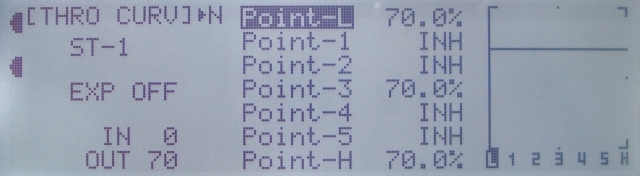
ST-1時
ST-2時